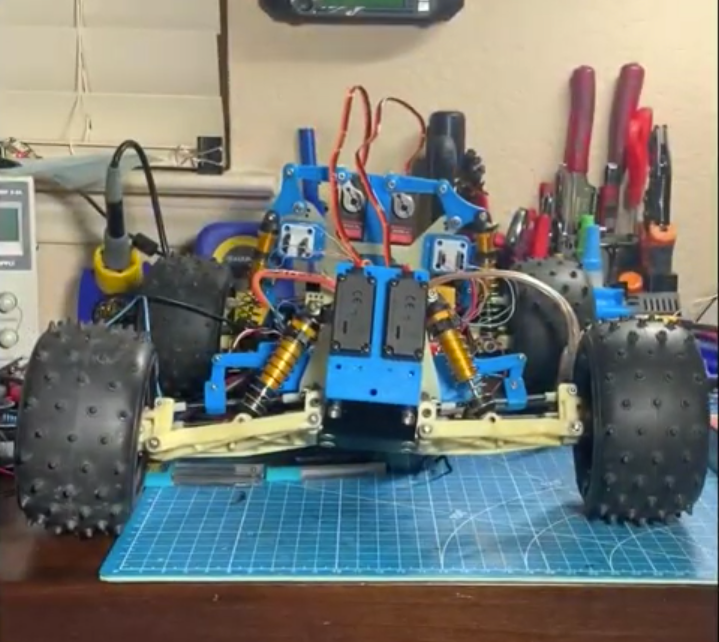
Active suspensions are almost a holy grail for cars, adding so much performance gain that certain types have even been banned from Formula 1 racing. That doesn’t stop them from being used on a wide variety of luxury and performance cars, though, as they can easily be tuned on the fly for comfort or improved handling. They also can be fitted to remote controlled cars as [Indeterminate Design] shows with this electronic servo-operated active suspension system for his RC truck.
Each of the four servos used in this build is linked to the mounting point of the existing coilover suspension on the truck. This allows the servo to change the angle that the suspension is positioned while the truck is moving. As a result, the truck has a dramatic performance enhancement including a tighter turning radius, more stability, and the capability of doing donuts. The control system runs on an Arduino with an ESP32 to enable live streaming of data, and also includes an MPU6050 to monitor the position of the truck’s frame while it is in motion.
There’s a lot going on in this build especially with regard to the control system that handles all of the servos. Right now it’s only programmed to try to keep the truck’s body relatively level, but [Indeterminate Design] plans to program several additional control modes in the future. There’s a lot of considerations to make with a system like this, and even more if you want to accommodate for Rocket League-like jumps.














An eccentric cam should give more travel range for the servo.
How so? Versus the rocker arm? I’m definitely looking for ways to continue to improve the design.
I suspect the MPU is a primary component instead of an “and also”. How else would the car know whether to raise or lower a wheel any better than a spring would?
The response time of the servo is probably fairly slow, slow enough that any additional info the MPU provides compared to information derived from vehicle speed and steering position (you can calculate expected centripetal acceleration and thus suspension loading from that) is likely minimal.
Just like last year’s https://hackaday.com/2020/01/13/active-suspension-r-c-car-really-rocks/ post on this.
I liked that one better
If you look at this channel, where that kit really shines is in RC rock crawlers (technically, ‘trail trucks’). If you watch the side by side videos of the system turned on and turned off, it’s incredible how much scale the system makes it look. Some people like competitions where maximum capability is the goal. Others just want to enjoy the scale aspect. These are the guys that usually have a spare tire on the roof or other things that would negatively impact the CG.
I do love watching Superscale’s videos. They’re super satisfying. Makes me want a crawler.
Superscale RC has been selling kits for this for years.
Mine has a much more complex control scheme than Superscale’s. Each wheel has an encoder that measures suspension deflection and it will use a controller scheme like groundhook or an h infinity to control the wheel force based on the differential velocity between the sprung and unsprung masses.
Plus you have different goals. Performance versus scale realism.
This is awesome work! It would be fun to add a forward-looking lidar unit to try out active suspension moves that anticipate upcoming terrain features…
I’d love to add lidar at some point. Given the speed limitations of the servos, having forward looking information would help greatly. The hardest part is I would need wheel speed sensors which I don’t know how I’d mount.
Magnet on/in the tire and hall effect sensors maybe? Space constraints make it hard to get high ppr but you could at least get a couple magnets on there.
I feel a disturbance in the force. As if thousands of Vintage RC10 collectors are crying out.