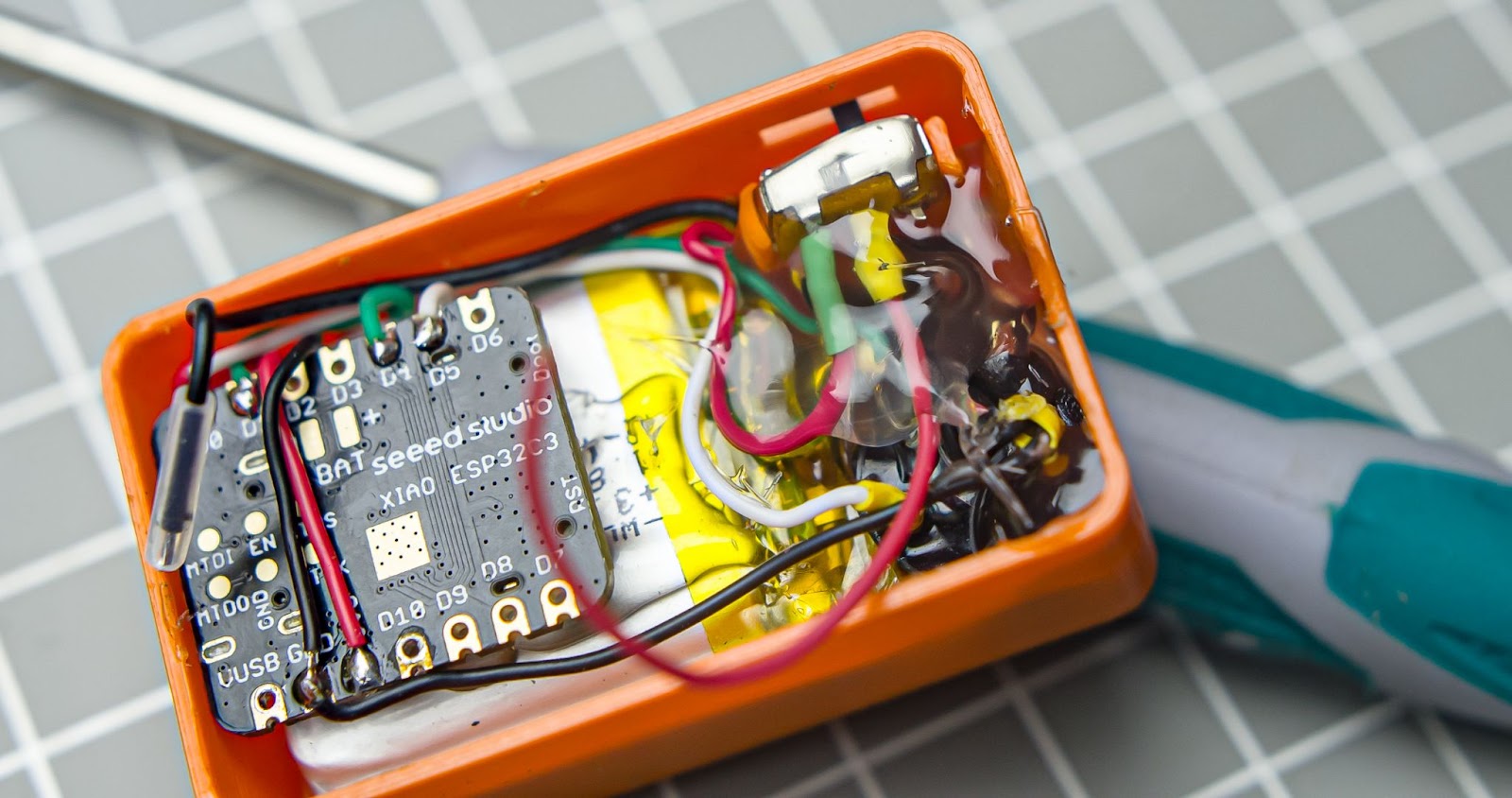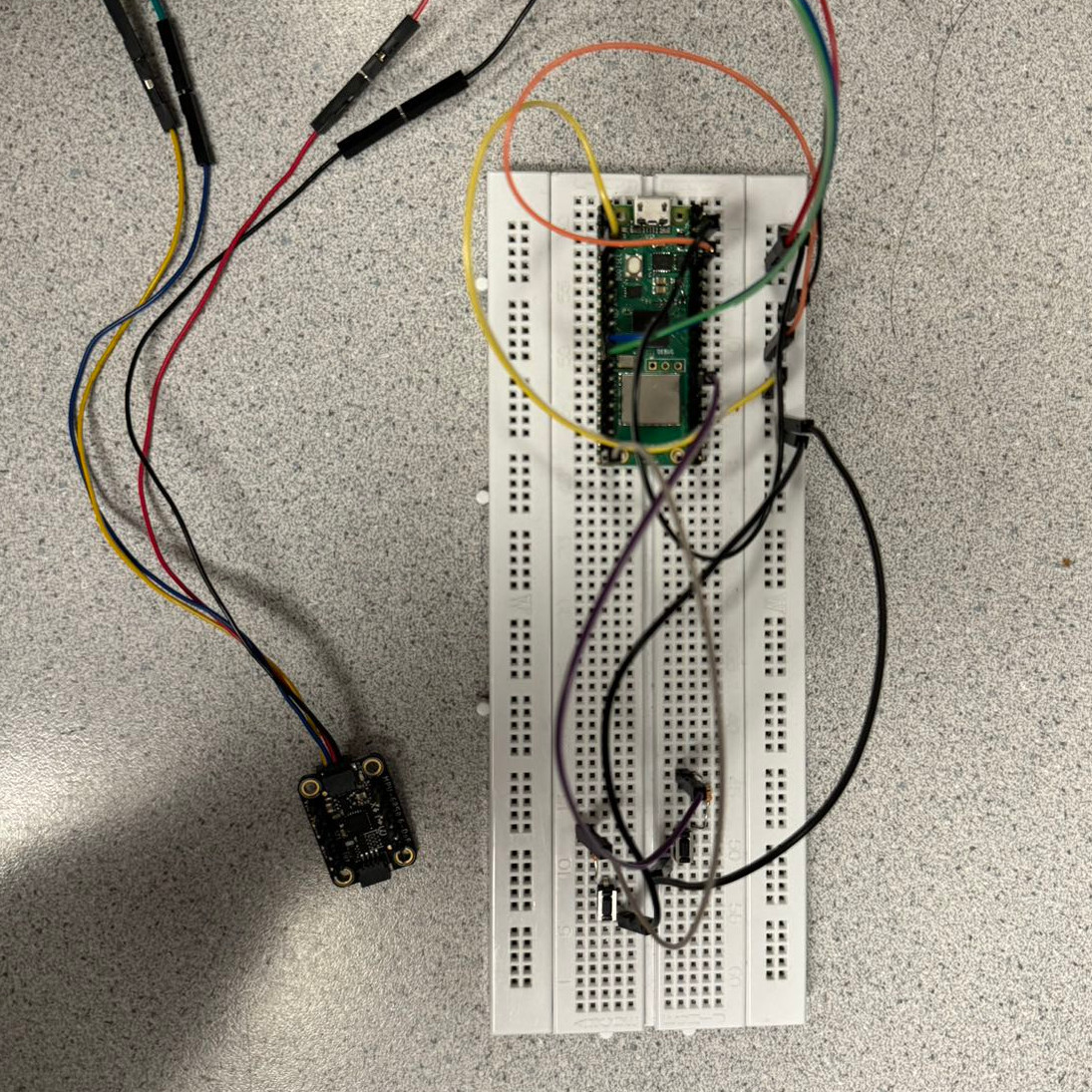
First of all, I love the brass rails — they give it that lovely circuit sculpture vibe. This bad boy was written in Rust and currently runs on a SparkFun ProMicro RP2040 board. For the mouse portion of the program, there’s an MPU6050 gyro/accelerometer.
[akavel]’s intent was to pair it with XR glasses, which sounds like a great combination to me. While typing is still a bit slow, [akavel] is improving at a noticeable pace and does some vim coding during hobby time.
In the future, [akavel] plans to try a BLE version, maybe even running off a single AA Ni-MH cell, and probably using an nRF52840. As for the 3D-printed shape, that was designed and printed by [akavel]’s dear friend [Cunfusu], who has made the files available over at Printables. Be sure to check it out in the brief demo video after the break.
Continue reading “Keebin’ With Kristina: The One With John Lennon’s Typewriter”