Twenty years ago, in a world dominated by dial-up connections and a fledgling World Wide Web, a group of New Zealand friends embarked on a journey. Their mission? To bring to life a Matrix fan film shot on a shoestring budget. The result was The Fanimatrix, a 16-minute amateur film just popular enough to have its own Wikipedia page.
As reported by TorrentFreak, the humble film would unknowingly become a crucial part of torrent history. It now stands as the world’s oldest active torrent, with an uptime now spanning a full 20 years. It has become a symbol of how peer-to-peer technology democratized distribution in a fast-changing world.
Have you ever wondered what’s actually going on inside the hotend of your 3D printer? It doesn’t seem like much of a mystery — the filament gets melty, it gets squeezed out by the pressure of the incoming unmelty filament, and lather, rinse, repeat. Or is there perhaps more to the story?
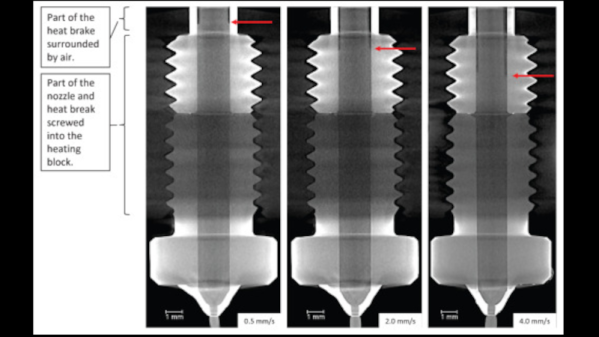
To find out, a team from the University of Stuttgart led by [Marc Kreutzbruck] took the unusual step of putting the business end of a 3D printer into a CT scanner, to get a detailed look at what’s actually going on in there. The test setup consisted of a Bondtech LGX extruder and an E3D V6 hot end mounted to a static frame. There was no need for X-Y-Z motion control during these experiments, but a load cell was added to measure extrusion force. The filament was a bit specialized — high-impact polystyrene (HIPS) mixed with a little bit of tungsten powder added (1% by volume) for better contrast to X-ray. The test system was small enough to be placed inside a micro CT scanner, which generated both 360-degree computed tomography images and 2D radiographs.
The observations made with this experimental setup were pretty eye-opening. The main take-home message is that higher filament speed translates to less contact area between the nozzle wall and the melt, thanks to an air gap between the solid filament and the metal of the nozzle. They also saw an increased tendency for the incoming filament to buckle at high extruder speeds, which matches up with practical experience. Also, filament speed is more determinative of print quality (as measured by extrusion force) than heater temperature is. Although both obviously play a role, they recommend that if higher print speed is needed, the best thing to optimize is hot end geometry, specifically an extended barrel to allow for sufficient melting time.
Earth-shattering stuff? Probably not, but it’s nice to see someone doing a systematic study on this, rather than relying on seat-of-the-pants observations. And the images are pretty cool too.
The loss of one’s sense of hearing or vision is likely to be devastating in the way that it impacts daily life. Fortunately many workarounds exist using one’s remaining senses — such as sign language — but what if not only your sense of hearing is gone, but you are also blind? Fortunately here, too, a workaround exists in the form of tactile signing, which is akin to visual sign language, except that it uses one’s sense of touch. This generally requires someone who knows tactile sign language to translate from spoken or written forms to tactile signaling. Yet what if you’re deaf-blind and without human assistance? This is where a new robotic system could conceivably fill in.
The Tatum T1 in use, with a more human-like skin covering the robot. (Credit: Tatum Robotics)
Developed by Tatum Robotics, the Tatum T1 is a a robotic hand and associated software that’s intended to provide this translation function, by taking in natural language information, whether spoken, written or in some digital format, and using a number of translation steps to create tactile sign language as output, whether it’s the ASL format, the BANZSL alphabet or another. These tactile signs are then expressed using the robotic hand, and a connected arm as needed, ideally using ASL gloss to convey as much information as quickly as possible, not unlike with visual ASL.
This also answers the question of why one would not just use a simple braille cell on a hand, as the signing speed is essential to keep up with real-time communications, unlike when, say, reading a book or email. A robotic companion like this could provide deaf-blind individuals with a critical bridge to the world around them. Currently the Tatum T1 is still in the testing phase, but hopefully before long it may be another tool for the tens of thousands of deaf-blind people in the US today.