In the ages before convenient global positioning satellites to query for one’s current location military aircraft required dedicated navigators in order to not get lost. This changed with increasing automation, including the arrival of increasingly more sophisticated electromechanical computers, such as the angle computer in the B-52 bomber’s star tracker that [Ken Shirriff] recently had a poke at.
We covered star trackers before, with this devices enabling the automation of celestial navigation. In effect, as long as you have a map of the visible stars and an accurate time source you will never get lost on Earth, or a few kilometers above its surface as the case may be.
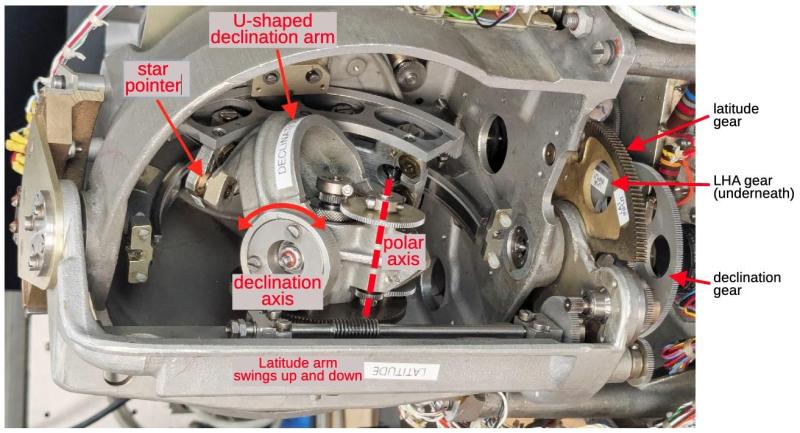
The B-52’s Angle Computer is part of the Astro Compass, which is the star tracker device that locks onto a star and outputs a heading that’s accurate to a tenth of a degree, while also allowing for position to be calculated from it. Inside the device a lot of calculations are being performed as explained in the article, though the full equations are quite complex.
Not burdening the navigator of a B-52 with having to ogle stars themselves with an instrument and scribbling down calculations on paper is a good idea, of course. Instead the Angle Computer solves the navigational triangle mechanically, essentially by modelling the celestial sphere with a metal half-sphere. The solving is thus done using this physical representation, involving numerous gears and other parts that are detailed in the article.
In addition to the mechanical components there are of course the motors driving it, feedback mechanisms and ways to interface with the instruments. For the 1950s this was definitely the way to design a computer like this, but of course as semiconductor transistors swept the computing landscape, this marvel of engineering would before long find itself too replaced with a fully digital version.














Here I come, Planet Claire!
Now you’ve got the Peter Gunn theme in my head.
Surely tenth of a minute of a degree? A tenth of a degree isn’t very accurate. that’s how I do it with the ol’ Astra 3b anyway. one nm at the equator is 0.1′
One nanometer resolution isn’t accurate enough??
Nautical Mile?
Should be NM, nmi, or M.
one nm at the equator is 0.1′
How do you get that?
A Nautical Mile (NM, or nmi) )is one arcminute. by definition (well, it used to be defined that way before the metric gods decreed otherwise)
Are you saying you get an uncertainty of 0.1 arcmin with your sextant, and that translates into an error of 1 NM? Or is what you call a “nm” is not a Nautical Mile (“NM”)?
All of it is true at the same time. Tried to stay concise but here we are.
Yes one arcminute is definition of a nautical mile (I used “nm” and in context I expected it to make sense, nautical custom being centuries old and I now see the error of my ways. ha pun) at equator for longitude.
But in reality the vernier reads to 0.1′ corresponding to about 1 nautical mile of positional error when you work it all out. Errors on a moving boat (typically, I’ve never used an aviation sextant from the air which have automated time averagers and stuff) being what they are. It is “generally agreed upon” that a one nautical mile of positional accuracy is about what a decent navigator can do most times. I suspect that’s why sextants “only” read to 0.1′ because the altitude isn’t the limiting factor for determining positional accuracy. A tenth of a degree like article says would be 0.6′ which would definitely be a huge error (absolute error of measurement as well as positional error). Maybe the instrument in the article really does only measure 0.1 degree and uses some other averaging techniques or tons of measurements and it all works out. Again I’m not super familiar with aviation sextants but I’m vaguely aware some have mechanical time averager systems of some type. And that the SR71 real-time tracked many stars in daylight for a positional accuracy of something like a 60 yard box in space. Something like that.
.
As to why sextants read in the insane units of decimal tenths of minutes of a degree AKA arcminute… which is sexegesemal (sp?)… anyone’s guess! I think really old ones still did DMS (degrees minutes seconds) but I cannot verify that and in any case it is impossible on a practical to shoot altitudes to less than the about 0.1′ one arcminute of course being 1/60th of a minute or… ~0.016′ much too small of an angle to resolve even with a vernier.
.
As an interesting (to me) side note, there are modern math methods of averaging and constraining your fix estimation that can result in surprising accuracy (See “fit slope” by David Burch). When I was on vacation in mountains I managed to get to within 100yd or so of GPS using repeated fixes throughout the day, something like 5 fixes at a session of a couple minutes, repeated every couple hours. It was massively labor intensive and I cannot prove I also didn’t just get pretty lucky. That I did this for fun on vacation probably says more about me than I’d like.
.
best
ug one arcsecond is obv 1/60 of an arcminute obv.
jargon. sorry wish I could edit…..
Don’t know the underlying reality but just wanted to point out the article says heading to 0.1 deg. It doesn’t say how precise the location is.
Once upon a time, you would scope Hackaday for the latest thing that everyone was getting into.
Nowadays, one must look further afield, as HAD has become detached an insular.
It’s ☠️
Go talk to a tree, please.
☠️
Eh, let ’em rant. Its as entertaining to them as our comments are to us. I do wish they had more interesting rants, but well, that’s just me :)
The B-52’s star tracker system as a whole is pretty interesting too. Wish it got covered in more detail.
Look further afield, eh? All I see beyond yonder hills is AI, AI, AI. And why not? In fact, if you invest a mere $70 million in my new AI company, we’ll be able to scale to $30 trillion in just 38 months!
GPS can fail, so you need backup systems.
In the ’80s I worked on an upgrade for the nav system for the RC-135, which needed very accurate navigation because of its use flying along the Soviet border close enough to get them to fire up their advanced RADAR so we could analyze it, without crossing the border and starting WWIII.
The existing system used an automated star tracker (great for absolute position, but not good for fast updates), inertial nav (great for fast updates, but drifts), and dead reconning based on ground speed RADAR.
We were adding GPS for an additional input.
I worked on interfacing 20 year old equipment to a modern computer, so I don’t know details of how the data was combined, but I assume it was all fed to a Kalman filter.
My ex-wife worked on an update to a similar system for an F-111 variant.
Lots of money spent on systems for a small handful of aircraft.
I was a comms guy with the Coast Guard for a while. One patrol the HH-65 assigned to our cutter over torqued the gear box and grounded itself about two weeks into the mission. Our air asset suddenly become a giant orange tick on the hull.
Anyway, the air crew took the opportunity to do a LOT of preventative maintenance on the bird. I got to watch them dig into the extremely crowded spaces behind the instrument panel and under the nose cowling. Turns out about half the gear in there was adapters and bridges to get the heavily modified 1980s airframe to talk to all the new stuff the service had been installing on them over the previous 30 years. Adapters on top of adapters.
Had some long conversations about the logic HQ used on when to upgrade what parts of the aircraft. It always came down to an argument between wanting upgraded drive trains or electronics.
“dead reconning” Shoes for industry!
How badly do I want an open hardware design of this, using modern electronics and optics. Truthfully we should have had an app long ago which can shoot larger stars, moon, planets, or sun and get some sort of fix with just the gyros and camera.
How different is this tracker from the one found on the SR-71 or Polaris missile? Most aircraft just had a navigator position near the flight engineer’s position in back of the cockpit both civil and military, the nav had a periscope sextant, you could also use the sextant hole to connect a vacuum hose to clean cigarette ashes in the cockpit.
Likewise. Is anyone aware of any open-source projects doing this for light aircraft or similar? Everything I’ve seen has been for open-source satellites getting a fix from stars. Unfortunately the atmospheric-flight use-case is slightly (significantly!) different, and – as was said above – probably involves star-finding + inertial navigation + terrain contour matching, all going through some sort of clever kallman filter. Would be really interested if anyone is building an R2-D2 for their GPS-denied ultralight aircraft.
It’s not actually that hard if you have room for a 10 foot rotating baseplate. Radius simplifies many things (including consequences of gear lash). And you can do the math and motors digitally; it’s only the physical elements that are tricky to gimmick up on a pizza-and-basement-bench budget.