Everybody loves aquariums. There’s something soothing about watching the lil’ critters inside them swimming, crawling and wriggling about. But at the same time few people are up to the task of ensuring that said critters stay alive and happy in said aquarium. This is where small robots may be able to steal some fishy jobs, like a modern take on the gaudy fake aquariums of the 1990s. Cue [CPSDrone]’s mini-drone aquarium with mostly maintenance-free robotic fish.
These pose a few interesting engineering challenges, such as the replacing of feeding fish by having them scuttle back to their charging station like an aquatic Roomba, and giving them some level of intelligence to the point that they at least appear to be doing something fish-like.
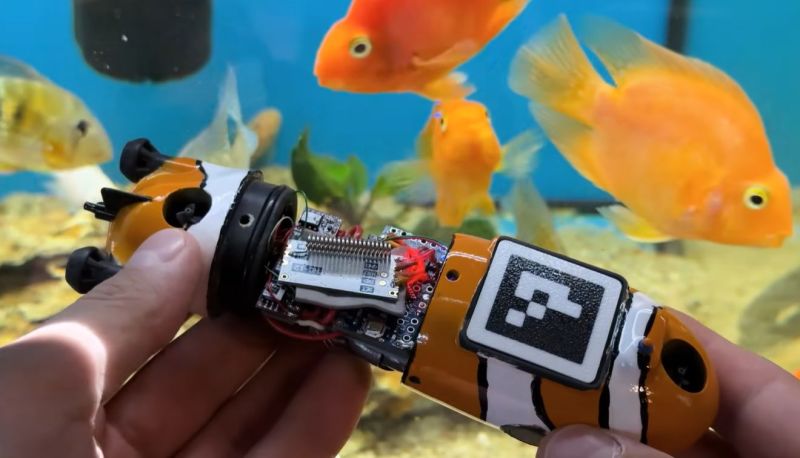
Rather than give each robot fish full autonomy, they are instead controlled by a central system. This then raised the problem of radio frequency communication while underwater. The theory was that 433 MHz transceivers would still work for something the size of an aquarium before attenuation spoils things, which a quick test confirmed to be true.
This enabled the construction of a small microcontroller-carrying submarine as a proof of concept before diving into the final version, involving resin 3D printed enclosures that are made water-tight using rubber O-ring seals and UV-cured resin. All that was left now was to add the big control system, which takes up much of the rest of the video.
Sadly they didn’t implement the boids algorithm, as this is pretty good at creating realistic life-like motion, as show with this demonstration by [Ben Eater]. This algorithm is pretty simple, with each ‘creature’ obeying rules on coherence, separation and alignment, creating a pattern that can be observed among schools of fish as well as flocks of birds. Due to its simplicity you could conceivably even omit the central control system and just give each ‘fish’ enough sensors to keep track of its buddies.














Robot fish are cool, the idea of them being lower maintenance than actual fish is….laughable.
Well, there are the algae and the cleaning required, and with robotic stuff you can add chemicals to the water to prevent them.
The end effect might alleviate a lot of the work involved in keeping an aquarium and the maintenance of the robotic fish might be ending up a few percent less effort that a classic aquarium.
These are guesses, I don’t have/had an aquarium.
Reminds me of this site:
botart.solarbotics.net/aquabots.html
and this tutorial:
botart.solarbotics.net/aquatutorial.html
also this site:
https://homebuiltrovs.com
Around that same time, I saw a clip on TechTV about a company making something similar. I thought they were called AquaBots, but I never found anything else about them in the decades since.
“Sadly they didn’t implement the boids algorithm”
Maybe, like me, he’s never heard of it. :-)
If the electrofishies are currently fully 100% centrally controlled, would they need some sort of presence sensing built into the individuals for this? Or would their approximate, commanded location suffice? Would they need orientation detection? Or could there be enough space left around them to keep from crashing into each other when they turn? Do birds and fish bump/crash into each other during their flocking/schooling maneuvers? Have all of these questions already been answered by work on flocking drones or nanobots? Can I think of any more questions to ask? Should I stop now? Yes, I should.
Are Flipper Zero exploits of aquaria coming soon to an aquatic habitat near you? Oh, the horror! Though I guess that Flipper wreaking revenge on fake fish prisons is somehow appropriate, even though said character was a dolphin and not a fish.
Now I’m thinking that the vast majority reading this comment may be too young to have any clue as to what I’m on about.
Fish, smish. Give me a miniature kraken taking out a miniature Nautilus sub.
Or a life size animatronic Jones the War Whale!
Miniature aquatic theater? That could catch on (for a while.)
There’s probably already a Reddit thread for that.
I wonder about passing an electric current through the water so they can charge passively instead of having to dock to charge.
A leaking pump lead to the discovery that apparently it doesn’t actually effect living fish to have a few hundred volts AC circulating, multimeter reading at the approximate length of a fish giving 135vac. Enough to tingle through a hole in a rubber glove. Although now since repaired just in case.
I had this exact thought too. If you’re going to get rid of the biological fish and replace with robots, why keep the water or other parts that may create algae or cause other issues. Let the fish-bots swim in some clear, electrolytic substance that you can pass current through to charge them and keep the box sealed or force the power off if/when someone opens the lid. If it’s for aesthetic purposes (vs. trying to make better robots that swim in open bodies of water), don’t make the solution harder for yourself.
Let the fish swim in mineral oil, then power and program them via NFC!
Nobody seems to remember Lister’s robot goldfish in “Red Dwarf”. I feel old. (They were battery powered, incidentally.)
Lennon and McCartney!
Is this Russian content?
Why? Do you want to sanction it?
I believe we call this idea “performative” and I mean ‘this is the exact opposite of what’s interesting about aquariums.’ Maintaining the delicate balance of an aquarium or terrarium, and nurturing pets is the thing that provides an avenue to nature that we so desperately need. In the future these skills will likely be even more important.
Sterility bad, messiness of life good.
Built I reserve the right to make an art piece about swimming robots.