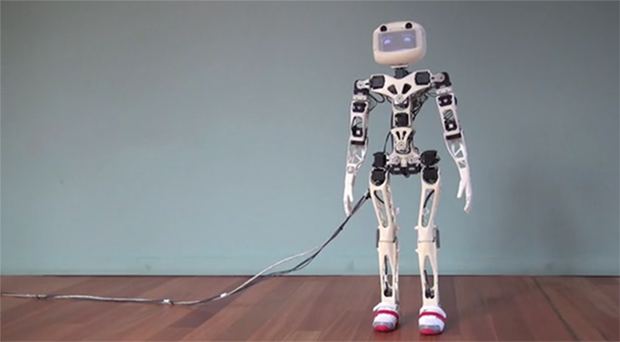
Coming from a lab in France is The Poppy Project, an open source humanoid robot that’s at least as cool as ASIMO.
Poppy was designed as an affordable bipedal robot for use in education and art. It’s a small robot at just over 80 cm in height, but it can walk, move its arms, rotate its torso, and interact with bags-of-meat humans with two cameras and an LCD face.
Although Poppy is open source, that doesn’t mean it’s exactly cheap; the current design includes twenty-one Robotis Dynamixels MX-28 robotic actuators, actually servos with magnetic encoders, temperature sensor, and an ARM microcontroller. These actuators sell for about $200, meaning Poppy contains $4000 in motors alone. The estimated cost of the entire robot is €7500-8000, or about $10,000 to $11,000 USD.
Still, there’s an incredible software platform that comes along with Poppy, and being open source any enterprising engineer can take up the project and attempt to bring the costs down. We’d love to take one out for a walk. Just get rid of the hands. That’s too far down the uncanny valley for us. Video below.