You’re gunna love my cuts.
KUKA robots are cool. They’re both elegant and terrifying to watch in action as they move unyieldingly to preform tasks. Not many of us get to use industrial tools like this because they aren’t exactly trivial to wield (or cheap!). Artists [Clemens Weisshaar] and [Reed Kram] however created an installation that allows anyone to potentially control one of these orange beauties to do their bidding… all from the safety and comfort of a computer chair.
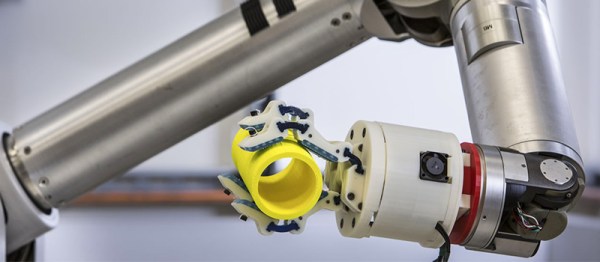
For their piece, “ROBOCHOP”, the artists developed a web app that allows you to easily manipulate the surface of a virtual cube. You can rotate for positioning and then use a straight or curved line tool to draw vectors through its surface and subtract material. Once you’re finished sculpting your desired masterpiece, one of the four KUKA robots in the installation will retrieve a 40 x 40 x 40 cm block of foam and shape it into a real-life version of whatever you created in the app.
 Starting today you can visit the project’s website and upload your own mutilated cube designs. If your design is selected by the artists, it will be among the 2000 pieces carved by the robots throughout their installation during CeBit in Hanover. After the show, your cube spawn will then be mailed to you free of charge! The only way I could see this being cooler, is if they filmed the process so you could watch your shape being born.
Starting today you can visit the project’s website and upload your own mutilated cube designs. If your design is selected by the artists, it will be among the 2000 pieces carved by the robots throughout their installation during CeBit in Hanover. After the show, your cube spawn will then be mailed to you free of charge! The only way I could see this being cooler, is if they filmed the process so you could watch your shape being born.
Anyhow, I personally couldn’t resist the invitation to sculpt Styrofoam remotely with an industrial grade robot arm and came up with this gem.
You can go to their page if you want to give the app a go, and really… why wouldn’t you?
Continue reading “ROBOCHOP! It Slices, Dices, But Wait! There’s More…”