It’s not uncommon to find us doodling on paper as an aid to thinking, for recreation, or simply because we’re bored. But, this kind of manual labor is so last century. It’s 2019, and we should have robots to fill our notebooks with cross-hatched illustrations. Well, [Alex Weber] is way ahead of us on this account: the outstanding SCARA drawbot he created can be unleashed to draw all manner of things at his command.
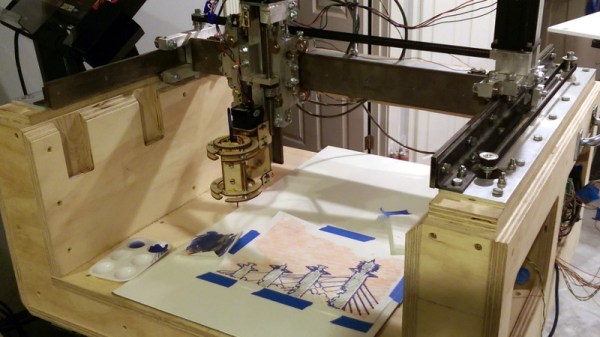
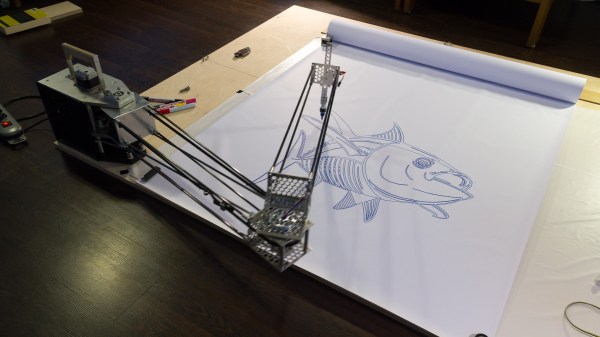
The robot, named Mechpen, and pronounced “McPen”, is of a SCARA (Selective Compliance Assembly Robot Arm) design, with two parallel axes controlling the x-y movement of the arm. Robot design is always a series of trade-offs; in this case, [Alex] has sacrificed some accuracy to achieve a long reach. Two NEMA 23 stepper motors reside in the base, along with all the electronics. This makes the base a heavy 15 kg, which is good as it helps stabilize the arm during movement. The arm uses a mix of off-the-shelf and custom hardware, most of which is dotted with holes drilled to reduce the mass of the moving parts. Two 700 mm sections of the arm made from carbon fiber tubes give the drawbot a 140 cm reach — long enough to fill an A0 paper with its beautiful mechanical doodling.
The brains behind the arm are two-tiered. An Einsy RAMBo board, designed for 3D printers, controls the stepper motors. Above that, a Raspberry Pi runs Octoprint to control the ‘bot. This choice turned out to be very convenient for working around a mechanical issue: the elbow flexes too far in the Z-axis. The difference in pen height between the elbow at 90 vs 180 degrees was 20-25 mm; too much to fix with just a spring-loaded pen. The solution: use a bed-leveling algorithm designed for 3D printers. A VL6180X distance sensor measures the distance to the paper over a number of grid points, then the software moves the servo up and down accordingly while drawing to keep the pen on the paper.
Some custom-written software converts SVG graphic files to gcode suitable for printing, allows selection of different stroke and fill types, and separation of different colors into individual gcode files to be plotted with different pens.
Definitely check out the video of Mechpen in action, after the break.
Continue reading “Mechpen: SCARA Drawbot For The Big Picture” →