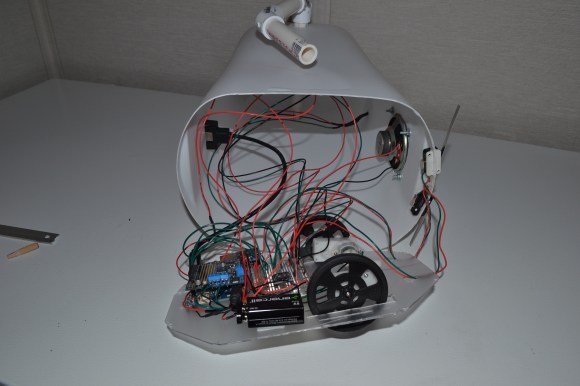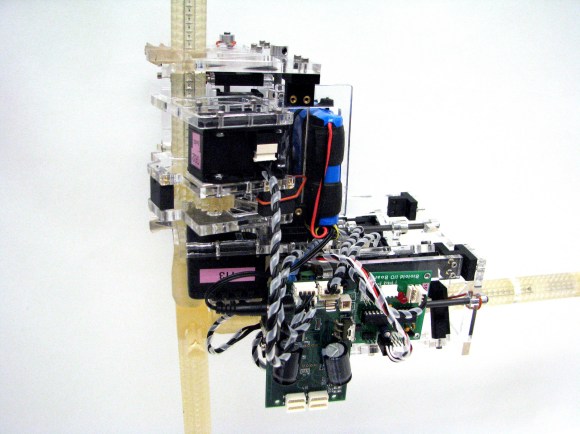
It might be difficult to tell from the picture, but you’re looking at a robot that is capable of building and disassembling simple truss structures. We’ll let that sink in for a moment.
[Jeremy Blum] finished his metabolic machine research back in 2011, but just this month has had his journal paper published in the IEEE Robotics and Automation Magazine on Structure-Reconfiguring Robots.
The concept behind this robot is biological metabolism – the ability to break down nutrients into building blocks, and then to use them to build new things. What if we could build a robot to emulate this most basic aspect of biology? Well, they have. Take a moment to imagine the implications in space: a fully automated deployment (or repair) of large structures. Or back on earth, large radio towers that are automatically assembled, welded, and even repaired if need be. The possibilities are amazing.
To see the Structure-Reconfiguring Robot in action and to learn a bit more about how it works, check out the video after the break.
Continue reading “Machine Metabolism: Structure-Reconfiguring Robots”