Many of us will have seen robotics or prosthetics operated by the electrical impulses detected from a person’s nerves, or their brain. In one form or another they are a staple of both mass-market technology news coverage and science fiction.
The point the TV journalists and the sci-fi authors fail to address though is this: how does it work? On a simple level they might say that the signal from an individual nerve is picked up just as though it were a wire in a loom, and sent to the prosthetic. But that’s a for-the-children explanation which is rather evidently not possible with a few electrodes on the skin. How do they really do it?
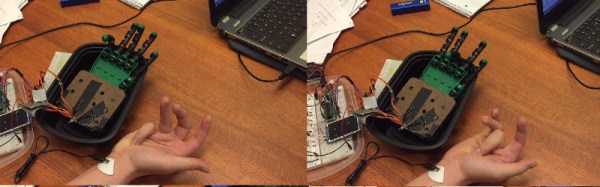
A project from [Bruce Land]’s Cornell University students [Michael Haidar], [Jason Hwang], and [Srikrishnaa Vadivel] seeks to answer that question. They’ve built an interface that allows them to control a robotic hand using signals gathered from electrodes placed on their forearms. And their write-up is a fascinating read, for within that project lie a multitude of challenges, of which the hand itself is only a minor one that they solved with an off-the-shelf kit.
The interface itself had to solve the problem of picking up the extremely weak nerve impulses while simultaneously avoiding interference from mains hum and fluorescent lights. They go into detail about their filter design, and their use of isolated power supplies to reduce this noise as much as possible.
Even with the perfect interface though they still have to train their software to identify different finger movements. Plotting the readings from their two electrodes as axes of a graph, they were able to map graph regions corresponding to individual muscles. Finally, the answer that displaces the for-the-children explanation.
There are several videos linked from their write-up, but the one we’re leaving you with below is a test performed in a low-noise environment. They found their lab had so much noise that they couldn’t reliably demonstrate all fingers moving, and we think it would be unfair to show you anything but their most successful demo. But it’s also worth remembering how hard it was to get there.
Continue reading “Move A Robotic Hand With Your Nerve Impulses”









