If you’ve made a robot or played around with electronics before, you might have used a time-of-flight laser distance sensor before. More modern ones detect not just the first reflection, but analyze subsequent reflections, or reflections that come in from different angles, to infer even more about what they’re looking at. These transient sensors usually aren’t the most accurate thing in the world, but four people from the University of Wisconsin managed to get far more out of one using some clever math. (Video, embedded below.)
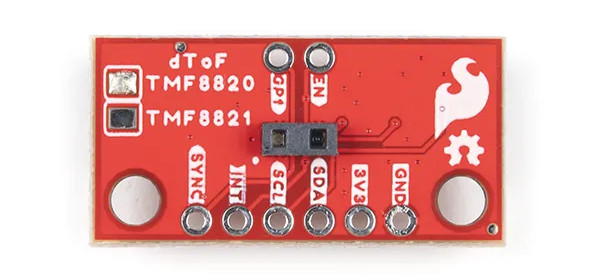
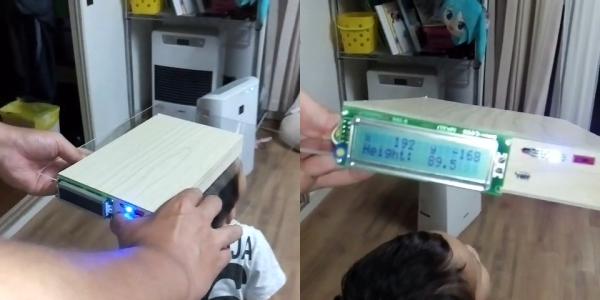
The transient sensors under investigation here sends out a pulse of light and records what it receives from nine angles in individual histograms. It then analyzes these histograms to make a rough estimate of the distance for each direction. But the sensor won’t tell us how it does so and it also isn’t very accurate. The team shows us how you can easily get a distance measurement that is more accurate and continues by showing how the nine distance estimates can even distinguish the geometry it’s looking, although to a limited extent. But they didn’t stop there: It can even detect the albedo of the material it’s looking at, which can be used to tell materials apart!
Overall, a great hack and we think this technology has potential – despite requiring more processing power. Continue reading “Turbocharge Your Transient Sensors With Math”
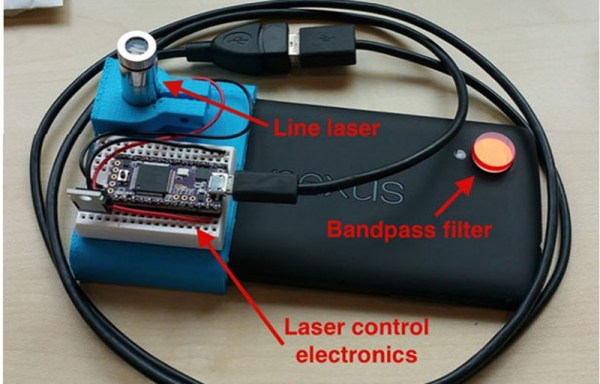


 [Patrick] has spent a lot of time around ground and aerial based autonomous robots, and over the last few years, he’s noticed a particular need for teams in robotics competitions to break through the ‘sensory bottleneck’ and get good data of the surrounding environment for navigational algorithms. The most well-funded teams in autonomous robotics competitions use LIDARs to scan the environment, but these are astonishingly expensive. With that, [Patrick] set out to create a cheaper solution.
[Patrick] has spent a lot of time around ground and aerial based autonomous robots, and over the last few years, he’s noticed a particular need for teams in robotics competitions to break through the ‘sensory bottleneck’ and get good data of the surrounding environment for navigational algorithms. The most well-funded teams in autonomous robotics competitions use LIDARs to scan the environment, but these are astonishingly expensive. With that, [Patrick] set out to create a cheaper solution.









