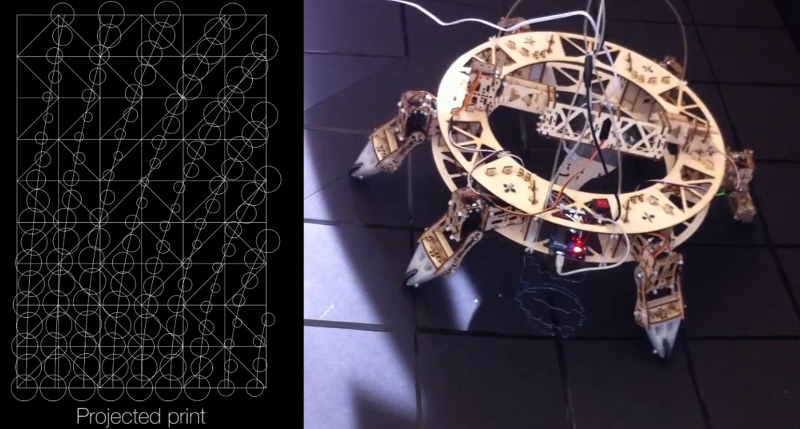
[Jia Wu, Mary Sek, and Jeff Maeshiro], students at the California College of the Arts (CCA) in San Francisco, took on the task of developing a walking 3D printer. The result is Geoweaver, a hexapod robot with a glue gun extruder system. Hackaday has seen walking CNC machines before, but not a 3D printer. Geoweaver uses two servos on each of its six legs to traverse the land. The team was able to program several gaits into the robot, allowing it to traverse uneven terrain. Walking is hard enough on its own, but Geoweaver also uses a glue gun based extruder to make 3D prints. The extruder head uses two servos to swing in a hemispherical arc. The arc is mapped in software to a flat plain plane, allowing the robot to drop a dollop of glue exactly where it is programmed to. Geoweaver doesn’t include much in the way of on board processing – an Arduino Uno is used to drive the 15 servos. Those servos coupled with a glue gun style heater pull quite a bit of power, which has earned Geoweaver nicknames such as Servo Killer, Eater of Shields, Melter of Wires, and Destroyer of Regulators.
Geoweaver’s prints may not be much to look at yet, however the important thing to remember is that one of the future visions for this robot is to print on a planetary scale. Geoweaver currently uses reacTIVision to provide computer control via an “eye in the sky”. ReacTIVision tracks a fiducial marker on the robot, and applies it to a topographical map of the terrain. This allows Geoweaver to change its height and print parameters depending on the flatness of the ground it is printing on. On a scaled up Geoweaver, reacTIVision would be replaced by GPS or a similar satellite based navigation system. Most of the software used in Geoweaver is opensource, including Grasshopper and Firefly, written by the team’s professor, [Jason Kelly Johnson]. The exception is Rhino 5. We would love to see an option for a free or open source alternative to laying out ~$1000 USD in software for our own Geoweaver.














How long before we start making buildings and bridges like this? Start with one little robot that scoops up dirt and garbage and spits out robots that proceed to build your house. When they are done making your house they go out back and make a lovely garden and then they fertilize the garden as they disassemble themselves back into dirt.
Send back the original robot and get your deposit back, they clean it up and send it out to another new homeowner.
Self-replicating machines…we’re going to need Jack O’Neill for this one!
Jaffa, kree!
Yeah. That was my first thought. I know, let’s equip it with molecular acid so it can kill us if we interfere.
Some time after the discovery of magic as a power source.
E = MC^2 All matter is energy when we can harness trash and convert it to power then this becomes a lot more practical.
If you’re going to hand wave converting matter to energy, then you don’t need the robot anymore. Just sprinkle some physics dust and wave your science wand and turn that vacant lot into a mansion.
A robot that can take a shit, what an age we live in! But F is right, this could be the beginning of robot construction, although I see robots being taken to the site, weaving a steel rebar structure and then spraying it with shotcrete to make a building shell in a day.
There are a few companies working on 3d printing concrete, they are interesting, but i don’t think they use rebar…. so there is that…
Like this one?
https://www.youtube.com/watch?v=ehnzfGP6sq4
Supreme Commander anyone?
“a flat plain”? C’mon guys, you are supposed to know what you are talking about.
Just a spell check error Andrew. Thanks! Good catch.
You need to not rely on a spell-checker. It won’t help you. But thanks for editing the article! Some HaD editors never bother.
Spell check is quite handy for misspelled words. One must however, choose the correct suggestion in order for a reading to be correct.
Rather than saying spell-checker “wont help you”, you might suggest that spell checker is not to be used as a grammar checker; which, if you have ever used the one in MS Word, you know is not so good when you are attempting to state a fact in a particular way.
Anything written in the same manner that Yoda speaks will be marked for correction.
It always helps to read what one has written before hitting the post button. Even at that, I will still miss things if I am rushing myself.
I feel kind of let down by this one, Yep its kind of cool but with the advancements in 3D printing and robotics I would have expected a little more.
Agreed, normal model-grade servos are just way too shitty, they could have at least something more precise for the print mechanism, this has way more potential…
This appears to be at the proof of concept stage and for that stage it succeeds.
The thing is printing while it is walking. And it does not have proper control of the material being extruded. If they mounted a delta on top of that thing, and had it walk much slower, it would likely have better output.
They have a lot of refinement to do on the algorithm that controls it’s gate as well as it’s print. All of that has to work together, and the height of the bot must remain steady so that the print can build properly.
This is a step closer to having a Realdoll which can get pregnant. Watch out.
What are you talking about?
Real dolls do get pregnant!
Oh wait, your talking about manufactured dolls aren’t you?
First off, thank you for the article and for all the great comments. In response to the last line of the article, Geoweaver can actually be run on the trial version of Rhino, so there’s no need to dish out $1000 for the full version!