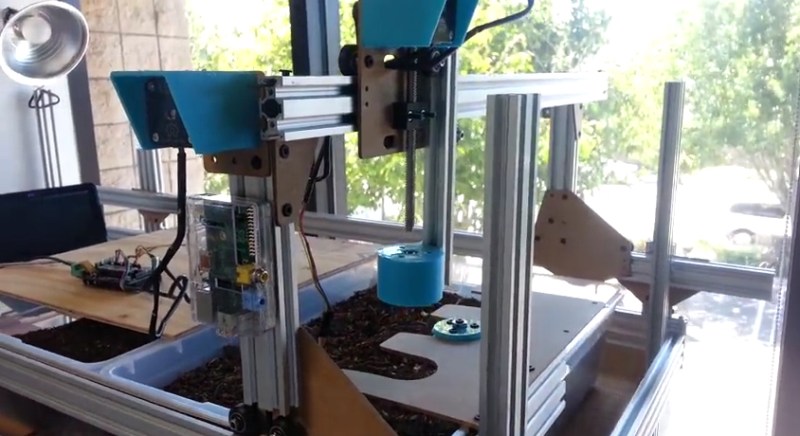
The FarmBot team has been pretty busy with their CNC Farming and Gathering machine. The idea is to automate the farming process with precise deployment of tools: plows, seed injection, watering, sensors, etc. An Arduino with an added RAMPS handles the movement, and a Raspi provides internet connectivity. Their prototype has already experienced four major iterations: the first revision addressed bigger issues such as frame/track stability and simplification of parts. Now they’re locking down the specifics on internet-of-things integration and coding for advanced movement functions.
The most recent upgrade provides a significant improvement by overhauling the implementation of the tools. Originally, the team envisioned a single, multi-function tool head design that carried everything around all the time. Problem is, the tool that’s in-use probably works best if it’s lower than the others, and piling them all onto one piece spells trouble. The solution? a universal tool mounting system, of course. You can see them testing their design in a video after the break.
If the FarmBot progress isn’t impressive enough—and admittedly we’d have called project lead [Rory Aronson] crazy for attempting to pull this off…but he did it—the FarmBot crew started and successfully funded an entire sub-project through Kickstarter. OpenFarm is an open-source database set to become the go-to wiki for all things farming and gardening. It’s the result of [Rory] encountering an overwhelming amount of generic, poorly written advice on plant growing, so he just crowdsourced a solution. You know, no sweat.
 The project featured in this post is a semifinalist in The Hackaday Prize.
The project featured in this post is a semifinalist in The Hackaday Prize.














This is the future. One of the most amazing projects I’ve ever seen!
please, no
I would have thought robots farming would be the future. That way they have essentially limitless build area. The CNC idea has the flaw that plants grow REALLY slowly, so the expensive technology spends almost the entire time not doing anything useful.
The hundreds of dollars of equipment is going to have a couple of kilograms yield per year. Unless it can grow truffles, it’s not even going to pay for itself, and the idea can’t be scaled very far.
I really like the idea of automated farming, and if their OpenFarm project really takes off, THAT will be an awesome thing, and would be worthy of a top prize.
Maybe the solution is to make the build area modular, too. Convey in a chunk of earth, do your FarmBot duties, then convey in the next block.
This has already been done several years ago.
…Except it was in Minecraft.
I love the FarmBot concept, but it’s going to need lots of specialized versions to deal with all the various types of plants (compare: rice, peas, and apples, to name but three).
Re: OpenFarm… [Rory] needs to take some of his 300+% KS funds and hire some interns to start fleshing out the content. They don’t have a single scrap of info on “watermelon”, yet!
Farmbot needs to work without soil/substrat, please make a Hydroponic Version.
Obligatory “Silent Running” reference.
“Take care of the forest…”
What, you never heard of it?
https://www.youtube.com/watch?v=TckJBvl_uT0
Reminds me a bit of a piece of university lab equipment.
I had my biggest laugh in weeks when I saw the farmbot stamping some weed into the ground.
https://www.youtube.com/watch?v=8r0CiLBM1o8&t=100