After two years of EE coursework, [Joshua Bateman] and [Adam Catley] were looking for a fun summer project. Instead of limping along with the resources they could put together themselves, they managed to get their school — Bristol University — to foot the bill!
Now Uni’s aren’t in the habit of just forking over funding for no reason, and we thing that’s why the two did such a great job of documenting their work. We’re used to seeing blogs devoted to one project, but this one has a vast portfolio of every piece of work that went into the build. Before any assembly started they drew out design diagrams to form the specification, laid out the circuit and the board artwork, and even worked out how the software would function in order to make sure the hardware met all their needs.
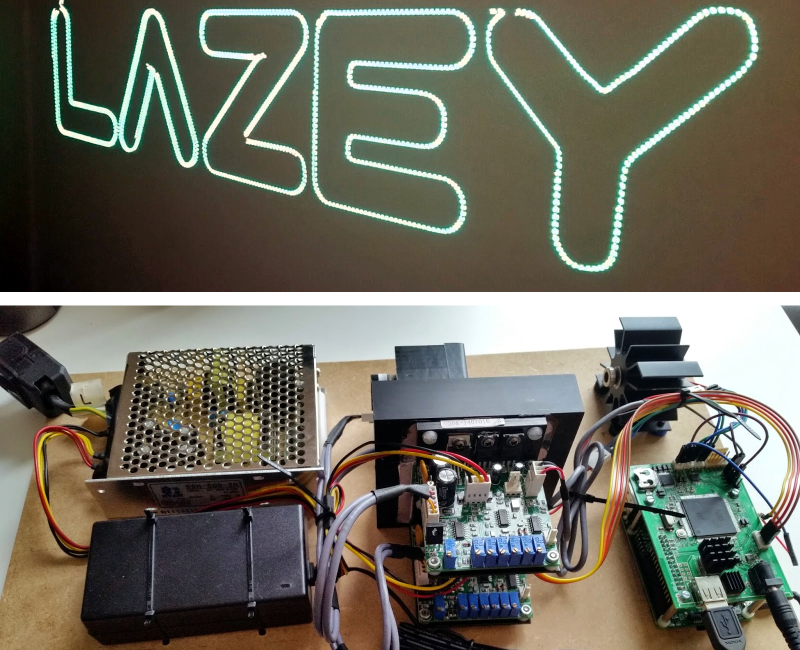
When the parts arrived the work of hand-populating the surface mount boards began. This is reflected in the fast-motion video they recorded including this clip which features a 176 pin LQFP. The driver board is a shield for a Raspberry Pi which drives the Galvanometers responsible for the X and Y movements of the mirror.
The video below shows off their success and the blog makes a great resource to point to when applying for work once a freshly minted diploma is in hand.
What do you think the next step should be? We’d advocate for a trip to crazy-town like this RGB laser projector we saw several years ago. Of course the same classic vector games we saw on Thursday would be equally awesome without alerting this hardware at all.














Very nice build. What should reduce the lag, improving corner sharpness etc, is moving the projector farther back from the screen. The galvos won’t have to turn as far for the same deflection distance on the screen.
Here’s a free gratis idea for a faster galvanometer movement. Use two servo motors powered in opposition to each other. Control which way and how fast it turns by *reducing* power to one or the other. With fine control of the power balance, having some level always going to both motors, it would avoid the ramp up/down delays of quickly switching a single motor back and forth.
Think of it as being somewhat like the control system on an F/A-18 Hornet. The plane is unstable yet it flies because the control system is constantly making minute corrections. The pilot’s control inputs don’t direct the aircraft to go a specific direction, they direct the stability control system to allow the plane to be unstable toward the direction the pilot desires to go. Instead of working against aerodynamic forces trying to keep it flying straight, it works with forces trying to make it go off course.
Two motors fighting each other could get a bit warm, so choose sufficiently robust ones that can take the heat and provide good cooling.
I want to see someone start *and finish* a LASER MAME projector. At least two previous attempts have been abandoned due to issues with things like severe corner rounding and needing to compensate for projecting onto a flat screen instead of on the inside of a spherical CRT face.
> Use two servo motors powered in opposition to each other.
Did you get this idea from a Looney Tunes film ?
This method is actually used in machinery for quick motions. At my last work place we had an Amada CNC punch that used servos to drive the punch, it used two servos working against each other to increase the punch speed. It increased it so much that they had to use a vacuum extraction system to get the slugs out of the way fast enough.
“What should reduce the lag, improving corner sharpness etc, is moving the projector farther back from the screen. The galvos won’t have to turn as far for the same deflection distance on the screen.”
I’m not sure what makes you think it will affect lag, corner sharpness, or anything other than making the image larger and not as bright. The galvos don’t know or care how far away the image is projected.
Do you mean that essentially for small signals galvos are already linear and the frequency response will remain the same?
Mojoe, Galane is suggesting moving the laser setup further away from the surface but mantaining the same display image size as before. This results in smaller deflections and in turn allows the galvo sysem to be run faster.
Could you mathematically compensate for the sphere to flat surface? You know the deflection degree and the correct curve of any vector monitor. How much hardware based post processing is required to modify the voltages coming off the board to accommodate for the flat surface… or any surface for that matter?
Previously:
http://hackaday.com/2013/03/12/playing-mame-games-on-a-rgb-laser-projector/
I built a multi-color laser projector a few years ago ago and made everything open source too (click my name for pictures and see my github for the source code, firmware, and kicad files).
Yes, moving the projector back helps significantly.
And another comment, 532nm lasers are slow to modulate which may explain all the tails you see in these vids. In addition to software improvements to get rid of these tails, you can also switch to using a direct drive diode (reds/blues) or one of the new 520nm laser modules. These 532nm lasers also often don’t come with ir filters so in addition to that lovely green, you may be exposed to the base wavelength used to generate the green (thankfully ir filters are cheap to buy)
Finally don’t forget about openlase as a software package to drive the laser. marcan did a great job with this open source software.
Could a shutter like say… from a camera do the trick?
I dunno, i haven’t looked at the timings on the laser and i know twittle about cameras. It probably won’t work, the shutter might be too slow……
You’re right – not fast enough. What would be needed would be some kind of electro-optical device like a Kerr cell or similar (which aren’t cheap or easy to build).
http://en.wikipedia.org/wiki/Acousto-optic_modulator
That is what you are looking for, a lot of high end laser projectors use them for improved modulation on DPSS lasers where they are still in use. Although most people are moving to diode or OPSL which don’t have the same issues.
There is also the polychromatic acousto-optical modulator: http://www.neostech.com/PDFs/polychromatic%20acousto%20optic%20systems.htm
That has the capability to modulate multiple wavelengths at once.
“would be equally awesome without alerting this hardware at all.”
Huh? I have no clue what “without alerting” means in this sentence.
Altering* reading hackaday but can not resolve a type?
Apparently I can not resolve a typo either.
Bring on Asteroids.
Seems perfect to play La Linea on it
http://www.youtube.com/watch?v=_NMYWQmURsM