We’ve been keeping tabs on the progress SpaceX has made toward landing a rocket so that it can be reused for future orbital launches. As you would imagine, this is incredibly difficult despite having some of the world’s greatest minds working on the task. To become one of those minds you have to start somewhere. It turns out, high school students can also build guided rockets, as [ArsenioDev] demonstrates in his project on hackaday.io.
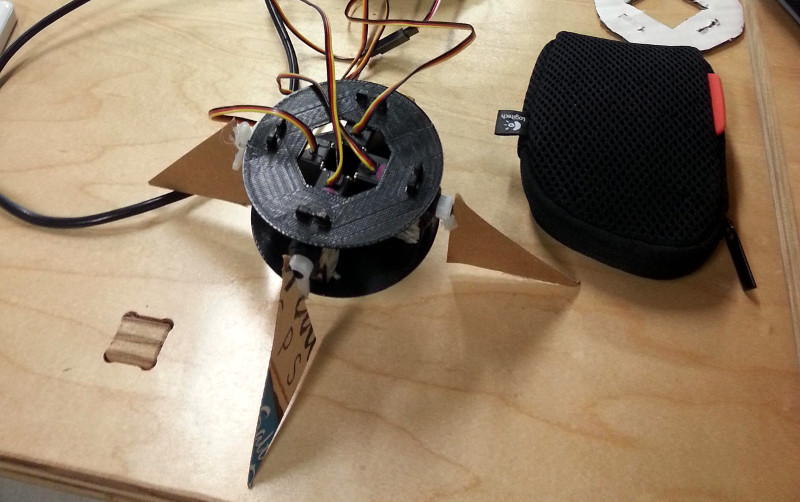
 [Arsenio]’s design targets amateur rockets with a fuselage diameter of four inches or so. The main control module is just a cylinder with four servos mounted along the perimeter and some fancy 3D printed fins bolted onto the servo. These are controlled by an Arduino and a 6DOF IMU that’s able to keep the rocket pointing straight up. Staaaay on target.
[Arsenio]’s design targets amateur rockets with a fuselage diameter of four inches or so. The main control module is just a cylinder with four servos mounted along the perimeter and some fancy 3D printed fins bolted onto the servo. These are controlled by an Arduino and a 6DOF IMU that’s able to keep the rocket pointing straight up. Staaaay on target.
We saw this project back at the Hackaday DC meetup a month ago, and [Arsenio] was kind enough to give a short lightning talk to the hundred or so people who turned up. You can catch a video of that below, along with one of the videos of his build.














can’t be done properly without a control system.
exactly what he created… A control system is just something that makes adjustments to something from measurements. He’s measuring how far off he is from vertical and then using the fins to adjust back…
The big question here is whether that control system is fast and accurate enough to be useful — something I highly doubt using cheap hobby servos.
I’ve been considering getting some blazing fast brushless digital servos but holy cow are they horrifically expensive
I am talking about a real control system.
Not a subtraction that is performed by an arduino.
Tuning the parameters for the control system is going to be the fun/hard part.
Yep, that’s the scary bit for me. Planning on hanging it on the side of a car then driving it down a runway to see how it behaves
A couple suggestions and thoughts…
Instead of attaching the servo to the top of the fin, move the pivot point down the fin a little more than 1/3 the way from the top… this will help when the servo tries to push against the wind – the servo won’t have to do all the work.
Also, I noticed in the video that the maximum deflection on the fin is at least 90 degrees… you might want to limit it to 45 degrees or less. A 90 degree deflection would have no effect in stabilization – it would cause a large amount of drag however. And you might not want the deflection of the fin to be the same as the sensor deflection…. my guess would be less than 50% or a 1:2 ratio of deflection to sensor motion.
Have you checked what the delay is between the motion of the sensor and the movement of the servo to correct for the motion? I’m guessing that the combination of sensor + microcontroller + servo (each inducing it’s own delay – especially the servo) would be too slow to prevent chatter or over correction.
Good work on this by the way and good luck.
“These are controlled by an Arduino and a 6DOF IMU”
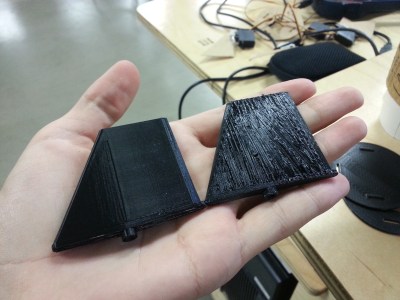
fancy 3D printed fins, look like cardboard to me.
Check the project logs, no idea why they didn’t use my new pics
I didn’t see the 3D printed fins mounted on the housing. I added a pic of the new fins in your hand to the body of the post.
Thank you!
I believe that fitting any active control system in an amateur rocket makes it a “missile”, so I would advise caution with this solution. If I recall correctly, most amateur rockets are gyro-stabilized.
Heh, the unmarked vans have not showed up yet.
ITAR Regulations 121.1, Category 4, paragraph H:
(1) Flight control and guidance systems (including guidance sets) specially designed for articles enumerated in paragraph (a) of this category (MT for those articles enumerated in paragraphs (a)(1) and (a)(2) of this category);
Note to paragraph (h)(1): A guidance set integrates the process of measuring and computing a vehicle’s position and velocity (i.e., navigation) with that of computing and sending commands to the vehicle’s flight control systems to correct the trajectory.
Can’t open source :(
IIRC this only applies to devices with a warhead.
What’s the difference between this and an RC rocket plane? There’s plenty of them about.
correct me if I’m wrong here, but does that tilt control scheme even work on a rocket? While the motor is burning the tilt signal is going to be tiny in relation to the acceleration vector. On top of that there are probably many flight modes with the model going sideways without a tilt registering on the imu.
To be honest, I have no idea… which is part of why I want to do this, best way to find out is to either succeed or fail
Isn’t putting any guidance system on a rocket a big no no?
Flight Stabilization != Guidance. He can’t pick a target and hit it.
Only if you’re not an american.
No, seriously;
ITAR Regulations 121.1, Category 4, paragraph H. It’s illegal to share (i.e. export) such a system, but it’s okay to have it.
And yes, this can be guidance – If you precomput the trajectory and put enough logic on board. You’d need a bit of testing of the platform, though. And GPS units are counted as missiles if they work at >15k and 500km/hr so most have functionality crippled if either condition is met, you could add the two together to get the hardware side sorted. The software and feedback side is non-trivial.
It’s fine.
As long as your ‘guidance system’ only keeps the rocket pointed straight up, or has it tracking the sun you’ll be fine in the eyes of the law. Local clubs may have more stringent bylaws. Active stabilization is perfectly legal.
Wouldn’t pass NAR standards. No control and nothing but light weight materials in the build I believe. And as fast as hobby rockets burn, you’d better have some super fast control inputs from that micro. I bet the motor has done burnt before the IMU updates the servos more than a time or two…
Yeah, I’ve noted that sanctioned launch sites for this are going to be pretty much impossible. The search for a wide open area to launch in is not going too well either, but I did find an airport that will let me drive down their runway to test the control authority with actual airflow over the fins
The fins would still work in the coast phase.
That’s the catch 22 here.
A hobby motor pretty much dumps it’s load (so to speak) in a split second, you get some coast, but not that much. A light rocket with a big motor can boost to thousands of feet, but it does so in a second or two before burnout and it will coast because its just cardboard, and not very heavy, you’ve burnt off the fuel, so that weight is gone.
But if you have servos and rigid enough support for them and dev boards and batteries, you have extra weight to push. There is momentum, but it is negated by having to accelerate that extra weight up to speed, and not for very long before burnout. “It flew straight as an arrow! – for 100ft…”
So you are asking an Arduino to read an IMU, do some math, output to a servo which has to react to that input, and servos are not terribly fast, even high speed servos and react mechanically, so you’ll only get a few updates (if that) before the motor is gone and your coast will be minimum because of the weight.
This really needs longer burning motors or stages to do much beyond what the fins are already doing, stabilizing the flight.
Mounting it to a car and driving down the road or wind tunnel testing would be great if this were a RC plane stabilizer, but you’re talking about something that would normally be from the ground to terminal altitude faster than you can blink. Nice alignment of the fins or setting the fins up to add some spin would probably be the saving grace here. I doubt the servos are helping much.
You would need FPGA speeds and strong, snap action actuators on the fins to be very effective. A lot of rockets and missiles use gas actuators and valves or super fast vanes at the nozzle and they are burning for a relatively long time.
have you thought about making a wind tunnel to test this? no idea how to do it, but a good start might be a leaf blower or two attached to one of those cardboard concrete form tubes.
Yes I have, that would have a messy helical airflow and I need a smooth linear flow. UMD is nearby, but wind tunnel time is prohibitively expensive
It never hurts to a ask them if they have some free time they would let you use. Just be sure to identify yourself as a high school student.
This might be a good application for an analog control system instead of digital. More response, better resolution and cheaper.
(And point out this HAD write-up. )
Except I graduated in June…. :|
Just do like they do in the fancy water jet fountains. Create a wall of straws drinking type or (3/8″ PEX tubing) all the air has to pass through. Fiddling with length until you get linear-enough flow.
Did a bit of research, your advice is exactly what I needed! I’ll be budgeting and designing a wind tunnel then (also open sourcing the plans along the way)
You’ve done it now. The Gubment will make you register and pay a fee.
Nice Project. I am working on something similar. But my system is using gimbaled thrust. I launched my rocket twice one success and one crash. I seems that the servos I used are to slow for their job.
While doing my research on rocket stabilization I found https://www.youtube.com/watch?v=pTDpV6fkEA8 . Maybe that is of interest for you.