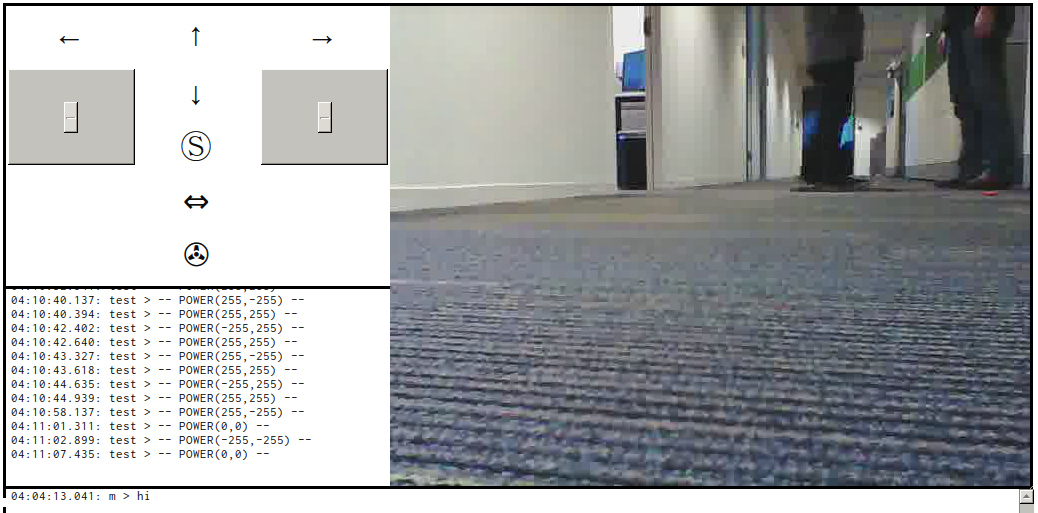
[Michael Brumlow] found us and sent us a link. Within a few seconds, we were driving a webcam-enabled Nerf dart tank through his office and trying not to hit walls or get stepped on by his co-workers. Unfortunately, it was out of darts at the time, but you can find them all over the floor if you scout around.
 All of the code details, including the link where you can test drive it yourself, are up on [Michael]’s GitHub. The brains are an Intel Edison board, and the brawns are supplied by an Arduino motor controller shield and (for the latest version) a chassis bought from China.
All of the code details, including the link where you can test drive it yourself, are up on [Michael]’s GitHub. The brains are an Intel Edison board, and the brawns are supplied by an Arduino motor controller shield and (for the latest version) a chassis bought from China.
It runs fairly smoothly, considering the long round trip from [Michael]’s office in Texas, through wherever Amazon keeps their Web Services, over to us in Germany and back. Once we got used to the slight lag, and started using the keyboard’s arrow keys for control, we were driving around like a pro.
It’s got a few glitches still, like the camera periodically overheating and running out of WiFi distance. [Michael] said he’d try to keep it charged up and running while you give it a shot. The controls are multiplexed in the cloud, so your chance of steering it is as good as anyone else’s. It’ll be interesting to see what happens when thousands of Hackaday readers try to control it at once!
It takes a certain kind of bravery to put your telepresence robot up on the open Internets. So kudos to you, [Michael], and we hope that you manage to get some work done this week, even though you will have all of Hackaday driving into your cubicle walls.