Whether it’s wheels, tracks, feet, or even a roly-poly body like BB-8, most robots have to deal with an essential problem: dirt and grit can get into the moving bits and cause problems. Some researchers from UCSD have come up with a clever way around this: pneumatically actuated soft-legged robots that adapt to rough terrain.
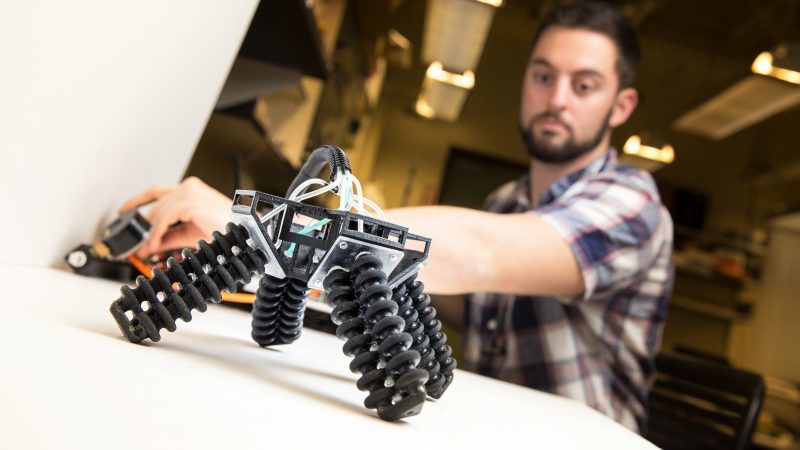
At a top speed of 20 mm per second, [Michael Tolley]’s squishy little robot won’t set any land speed records. But for applications like search and rescue or placing sensors in inhospitable or inaccessible locations, slow and steady might just win the race. The quadrupedal robot’s running gear can be completely 3D-printed on any commercial printer capable of using a soft filament. The legs each contain three parallel air chambers within a bellowed outer skin; alternating how the chambers are inflated controls how they move. The soft legs adapt to unstructured terrain and are completely sealed, eliminating intrusion problems. The video below shows how the bot gets around just fine over rocks and sand.
The legs remind us a little of our [Joshua Vazquez]’s tentacle mechanism, but with fewer parts. Right now, the soft robot is tethered to its air supply, but the team is working on a miniaturized pump to make the whole thing mobile. At which point we bet it’ll even be able to swim.














Wouldn’t a snake robot (http://snakerobots.com/) be better for S&R?
For what it’s worth I’m a part of the Danish Urban Search and Rescue team, and I think there is a pretty long way to go before this could be deploy’ed in USAR type missions.
Yes, it might be able to cope with loose and unstructured terrain like brick and concrete debris, but speed is of some concern. I have a hard time imaging a scenario where a tracked or wheeled robot, a multi rotor or like in most cases a dog wont be better, even if this was developed to a stage like you see from Boston Dynamics.
Concerns may include:
* Transport size
We have to be able to travel by Air. Space and weight is therefore at a premium. Even if paying for multiple airplanes is not a consern, airports in an earthquake affected area will allways be overloaded with NGO’s, USAR teams and other officials.
* Multi purpose
Like above. A Multi-Rotor could be used for both room/cavity search near unstable buildings and for an eye in the sky.
* Operator simplicity
Every person on the team should be utilized as much as possible. Bringing an expert insted of a full rescue member only for operating a search device is therefore a non-starter. This can also be a problem with dog handlers.
* Sensor capabilities
Nothing beats a dogs ability (unfortunately) to sniff out people and autonomously scan a building. They are also able to tell the difference between alive and dead people. Only thing i can think of to rival this would be some kind of heartbeat positioning system.
A snake robot might have more of a benefit than this thing, but only in narrow use cases.
Other products to compete with are seismic listening devices like the Delsar LifeDetector and often a simple boom-camera like a SearchCam.
Cost is however often not a big concern. A simple SearchCam for comparison can easily cost USD15k.
Sorry for the rant. Just my view of how to evaluate a possible solution to this.
And these concerns might only be valid for international missions like we prepare for (INSARAG USAR).
“only in narrow use cases”
I see what you did there :)
I can see this getting its legs caught in crawling vines.
This is a lot of great information! Rants like yours can save thousands in R&D costs.
It really helps to know exactly where your specific pain points are for your current situation, so engineers who have little practical real-world experience can apply their technical skills to find solutions to your problem, instead of finding problems for their solution ;)
Now put all that electronics and pneumatics on top it and make it carry it…
“At which point we bet it’ll even be able to swim.” More like float & wiggle around.
Like the comment above : honestly, I like science fiction and selling dreams and don’t like to break growing ideas, but here. The pneumatic muscles are great for fixed industrial machines, here we talk about locomotion which include autonomy of mobility and probably carrying the source of energy, or is the air pipe planned to be unrolled while it scrolls under a building ?
Nevertheless, I like it, and I would be willing to see at least a wider or a much wider legs movement angle…
Maybe when making/designing the legs a chamber of two extra per leg… one controls the length of the leg, the other (two/three) control the angle of the leg. It looks from the video as though it is all done together, and the bot seems to experience quite some difficulty with sand & rocks as a result. Note: this is not a criticism, more an observation.