For all their capacity, shutting down a Raspberry Pi can be a bothersome routine depending on how you have it set up — historically and abrupt cut to the power risks corrupting the SD card. [madlab5] had to make a few changes to a Pi running in headless mode, requiring them to access it externally to shut it down to prevent any damage from pulling the plug. So, why not take the opportunity to whip up a soft shut-down switch?
This is a great beginner project to get one accustomed to working with a Pi. With this in mind, [madlab5] went through two revisions of this idea: the simple way, and the fun way. For the simple way just press the button and the Pi activates a script which shuts it down in thirty seconds. Job done. But, realizing there may be a few circumstances where they’d need more functionality, [madlab5] decided to take a second swing at this.
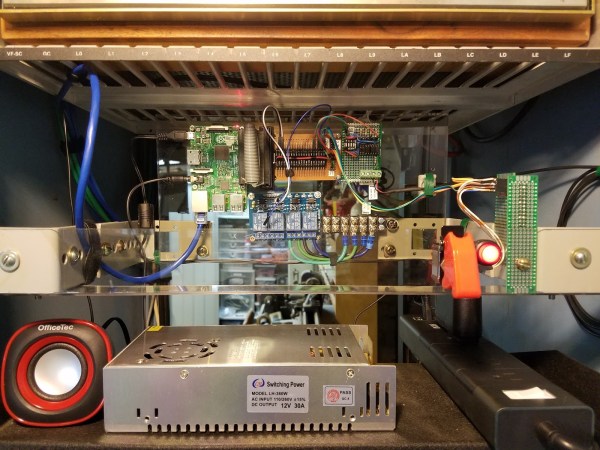
[madlab5]’s fun way involves a button with a built-in LED and a speaker to blare an announcement that the Pi will self destruct shut down after a short time. Setting the switch up this way takes a little more doing, but you get to add a little more character to your Pi with a custom shutdown report, as well as the option to cancel an accidental button-press.
For any newbies out there, [madlab5] is kind enough to provide their code and diagrams in their blog post. If remotes are more your thing, we have also featured a similar beginner project to shut down your Pi.
[via /r/Raspberry_Pi_Projects]