
ASPIR, the Autonomous Support and Positive Inspiration Robot is an goblin-sized robot, designed by [John Choi], aims to split the difference between smaller hobbyist robots and more robust but pricy full-sized humanoids only a research institute could afford. By contrast, [John] estimates it cost a relatively meager $2,500 to create such a homunculus.
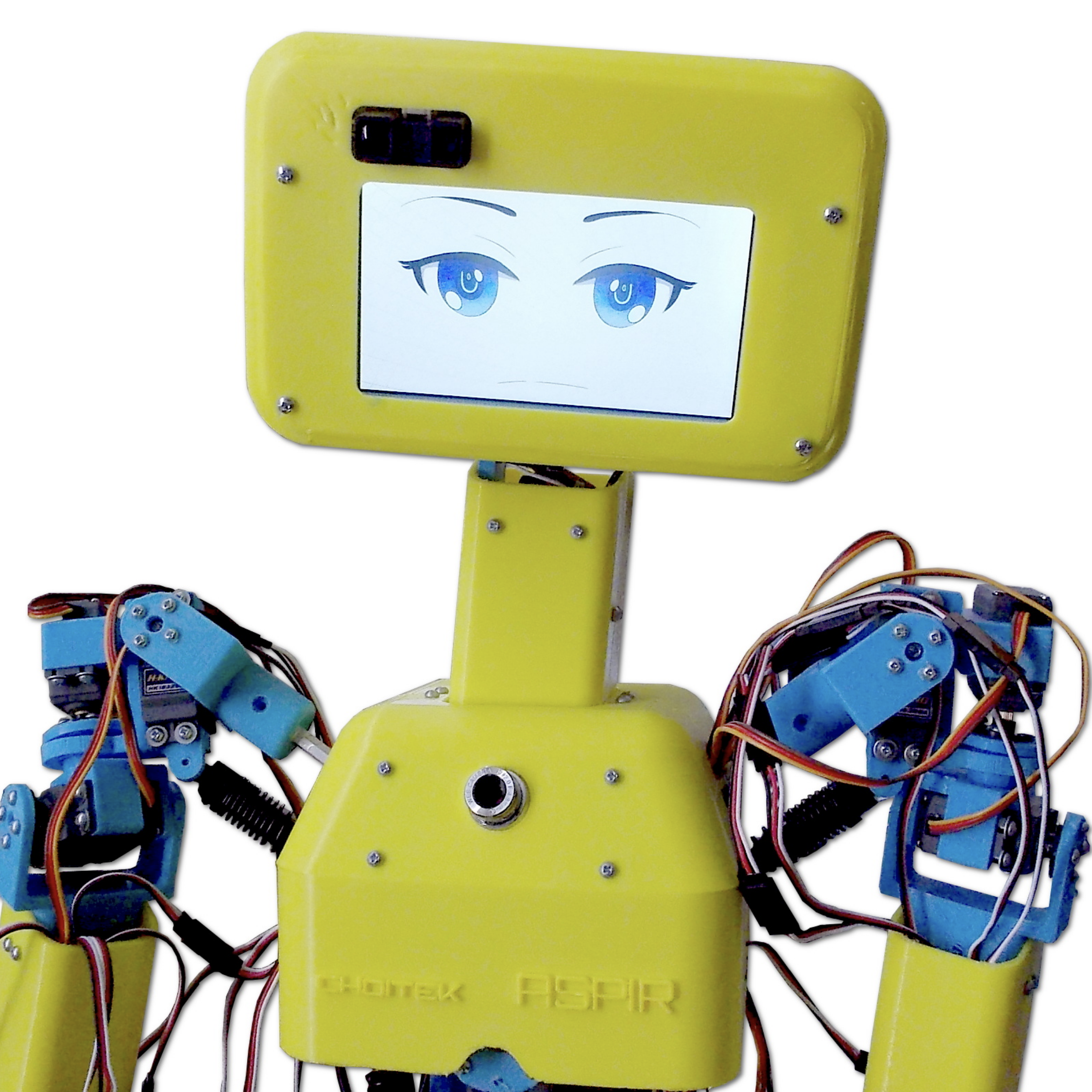 The robot consists of 33 servos of various types moving the limb, controlled by an Arduino Mega with a servo control shield seated on it. The chassis uses 5 kg of filament and took 300 hours to print, and it has a skeleton made up of aluminum hex rods. Spring-loaded RC shocks help reinforce the shoulders. There are some nice touches, like 3D-printed hands with living hinge fingers, each digit actuated by a metal-gear micro servo. It stores its power bricks in its shins. For sensors it includes a chest-mounted webcam and a laser distance sensor.
The robot consists of 33 servos of various types moving the limb, controlled by an Arduino Mega with a servo control shield seated on it. The chassis uses 5 kg of filament and took 300 hours to print, and it has a skeleton made up of aluminum hex rods. Spring-loaded RC shocks help reinforce the shoulders. There are some nice touches, like 3D-printed hands with living hinge fingers, each digit actuated by a metal-gear micro servo. It stores its power bricks in its shins. For sensors it includes a chest-mounted webcam and a laser distance sensor.
The main design feature is the Android smartphone serving as its brains, and also — at least cosmetically — its eyes. Those eyes… might be just a teensy bit too Chucky for our taste. (Nice work, [John]!)














Video or it didn’t happen….
You don’t want to watch it… it’s a sexbot.
?!?! huh ?!?!
So it does come with a fleshlite attachment. I was wondering. But then of course it does.
What a nice project, a statement to the usefulness of RC servos.
The hands are cleverly designed. I wonder how strong those servo’s are and what the max. lifting force of the hand could be. Just curious. Are there videos available yet?
The head may deserve some extra details or remodeling, the rectangular shape of the head in combination with those pretty eyes are a little scary to me while the rest of the robot is very appealing.
A very fun project can’t wait to see/hear/read more about it.
Face reminds me of the flying robot guy you had to save in Perfect Dark…
reminds me of Baxter and Sawyer of Rethink Robotics…
Nice work dude! Just wanted to say thank you for open sourcing the CAD files for this! This is just freaking awesome on so many levels!
Everything available thru the Instructables link. STL files are on github.
This is not a *real* Golem. For if it were, he would inscribe the following beneath it:
He who will find the secret of my life at his feet, him will I serve until beyond time.
He who shall evoke me in the seventeenth century, beware! For I cannot by fire be destroyed.
He who shall evoke me in the eighteenth century, beware! For I cannot by fire or by water be destroyed.
He who evokes me in the nineteenth century, beware! For I cannot by fire or by water or by force be destroyed.
He who in the twentieth century shall dare evoke me, beware! For neither by fire nor water, nor force, nor anything by man created, can I be destroyed.
He who in the twenty-first century evokes me, must be of God’s hand himself, because on this Earth, the person of man existeth no more.
This seems to be the physical construction only. From John Choi in the comments: “I haven’t coded the walking motion yet, but its a part of the plan. Right now, the Instructable just covers the hardware, as I’m still working on the software.”
The real utility will be when significant communities develop around using a cheap android phone as significant brains for these types of projects, even with the Mega servo interface. Given that you can get a no-contract phone for US$20 – 30 new complete with everything from video camera to WiFi, this would displace a lot of the microprocessors we’re all fond of in a real hurry.
Using standard RC servos is going to be a problem because there is no position feedback. See my article on an RC servo arm for an explanation of the problem: https://hackaday.com/2016/06/24/taming-robot-arm-jump-with-accelerometers/
There are no IMU sensors which means it will never walk.
The physical build looks good but it’s going to take a lot more electronics to make it work.
phone accelerometer?