
Alex Williams pulled off an incredible engineering project. He developed an Autonomous Underwater Vehicle (AUV) which uses a buoyancy engine rather than propellers as its propulsion mechanism and made the entire project Open Source and Open Hardware.
The design aims to make extended duration missions a possibility by using very little power to move the vessel. What’s as remarkable as the project itself is that Alex made a goal for himself to document the project to the level that it is fully reproducible. His success in both of these areas is what makes the Open Source Underwater Glider the perfect Grand Prize winner for the 2017 Hackaday Prize.
We got to sit down with Alex the morning after he won to talk about the project and the path he took to get here.
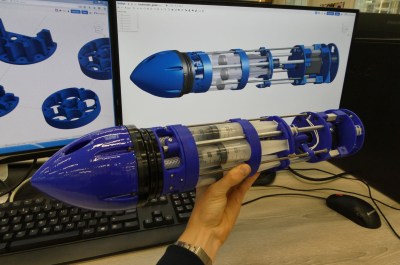
The bouyancy engine Alex speaks about is located in the nose of the glider. He was clever to choose medical syringes as an off-the-shelf option for moving water in and out of the glider to affect boyancy. They’re cheaply and readily available, and designed for moving liquids in exactly the way needed for the project. Alex collects six of them together and moves the plungers in union with a single machine screw at the center. After comparing tests between this and a peristaltic pump design he found that the syringe design operates more efficiently and to us it appears to be much less complicated to build.
This platform is designed to be used for autonomous tasks like data acquisition over large areas in the ocean. Since it doesn’t use active locomotion it can do its job unattended for days at a time. Two fixed fins on the glider convert downward motion to forward lateral motion when the nose of the glider is filled with or purged of water.
The current revision of the design is complete, and Alex is now looking for an opportunity to do some proper open water testing to figure out the limits and capabilities of the system. This will answer some questions like how the bouyancy system will hold up to the pressure, how much more efficiency can be gained by deeper dives, and how well a balance shifting system will work for turning the vessel.
The Origin Story of Alex Williams
 Alex shared some of his background during his interview and hearing about his path is absolutely fascinating. When he started working on the Open Source Underwater Glider he was doing his A-levels (in the UK this is the final year of education before college). His fabrication skills are self-taught, and he cites LEGO as his entry into engineering. He’s been doing 3D modeling for years. Alex got started in modelling with Blender, honed his skill on SolidWorks, and most recently transitioned to using Onshape.
Alex shared some of his background during his interview and hearing about his path is absolutely fascinating. When he started working on the Open Source Underwater Glider he was doing his A-levels (in the UK this is the final year of education before college). His fabrication skills are self-taught, and he cites LEGO as his entry into engineering. He’s been doing 3D modeling for years. Alex got started in modelling with Blender, honed his skill on SolidWorks, and most recently transitioned to using Onshape.
Alex has been studying engineering at college this year but the coursework was mostly theoretical. Having thrown so much of himself into this project has shown him that he needs an engineering school that puts emphasis on practical study (in other words: building stuff). If you know the perfect program, please get in touch with Alex. We think any college would be lucky to have him in the student body.
The Future of Open Source Underwater Glider
The most amazing part of this project is the level of openness and documentation Alex has achieved. He has a plan to test and improve upon the current design. The $50,000 grand prize will certainly help open some doors, but ultimately he needs to take the prototype out for open water testing and there the level of complexity will grow very rapidly.
The most successful open source and open hardware projects don’t hinge on one person, but leverage the excitement, experience, and support of teams of people. We’ve already seen folks with vast experience in this realm lending their support in the comments of Alex’s project page. If you are interested in this project, reach out to Alex and let him know. Let’s build up a community for this project and continue the work to Build Something that Matters.

















Send him to MIT!
Profile link is wrong — try this: https://hackaday.io/aswilliams
Thanks, fixed.
Continually blown away by this project. I built a few rather miserable ROVs in my younger days as my parents had at place at the shore, so this really resonates with me. His buoyancy setup is so elegant, I can’t believe the nonsense I was trying to rig up with thrusters and pressurized air…
Thanks! I’ve really loved working on it and have put countless hours into the development and documentation of the glider, so it’s great to see the reception it’s getting. There were a couple of syringe based systems out there (mainly a servo on the end of a modified syringe) but I tried my best to iterate upon this and build a complete system. Also, the 6 syringes inside the 4″ tubing also means that the buoyancy engine is rather compact and has a rather “industrial” feel to it :-D
Alex,
Great job! Congratulations!
Interesting design. Has anyone tried shifting the center of gravity using a fixed weight inside the UAV in conjunction with the syringe pump? (For instance using a weight on a cable that moves the weight forward and aft)
It’s surprisingly how much the UAV reminds me of a dolphin swimming in the water.
Cheers! The glider currently has a mass that can move forward/back and rotate to move the centre of mass to affect pitch/roll. The glider will soon have a PID algorithm so that it maintains a constant angle of attack in the water using the mass and I will more extensively test the roll to turn when I have access to a larger body of water. The pitch system in action here: youtu.be/WVg47-5Skjs?t=79
As I look at this the centre of gravity is also “centre” of buoyancy. Water in the syringes => the ROV sinks/sails downward. Empty syringes => ROV rises/sails upwards.
Hey Alex, sorry to hear that the Cambridge course is still so theoretical. The lab work in the first 2 years was good fun I thought but I found most of the course to be more of a course in applied maths than any actual engineering. The token gesture of the IDP (end of 2nd year) was okay but you still weren’t given much freedom. Let’s hope somewhere in the UK offers you a place (and we don’t get more brain drain to the US). I think Cambridge really excels for post-grads in engineering. They get a lot of brilliant people onto the undergrad course then don’t let them stretch their creative wings.
Yes I think you’d be hard pushed to find a decent actual engineering course in the UK. Like you, I found the lab work really great but the rest of it pretty much irrelevant. I’d recommend doing an HND instead.