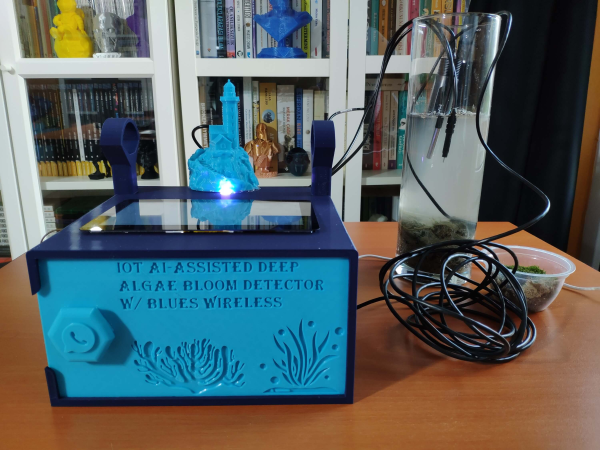
Harmful Algal Blooms (HABs) can have negative consequences for both marine life and human health, so it can be helpful to have early warning of when they’re on the way. Algal blooms deep below the surface can be especially difficult to detect, which is why [kutluhan_aktar] built an AI-assisted algal bloom detector.
After taking images of deep algal blooms with a boroscope, [kutluhan_aktar] trained a machine learning algorithm on them so a Raspberry Pi 4 could recognize future occurrences. For additional water quality information, the device also has an Arduino Nano connected to pH, TDS (total dissolved solids), and water temperature sensors which then are fed to the Pi via a serial connection. Once a potential bloom is spotted, the user can be notified via WhatsApp and appropriate measures taken.
If you’re looking for more environmental sensing hacks, check out the OpenCTD, this swarm of autonomous boats, or this drone buoy riding the Gulf Stream.