“Every block of expanded polystyrene foam has a statue inside it and it is the task of the dual-arm hot wire-wielding robot to discover it.” — [Michelangelo], probably.
Be prepared to have your mind blown by this dual-wielding hot-wire 3D foam cutter (PDF). We’ve all seen simple hot-wire cutters before, whether they be manual-feed cutters or CNC-controlled like a 3D-printer. The idea is to pass current through a wire to heat it up just enough to melt a path as it’s guided through a block of polystyrene foam. Compared to cutting with a knife or a saw, hot-wire cuts are smooth as silk and produces mercifully little of that styrofoam detritus that gets all over your workspace.
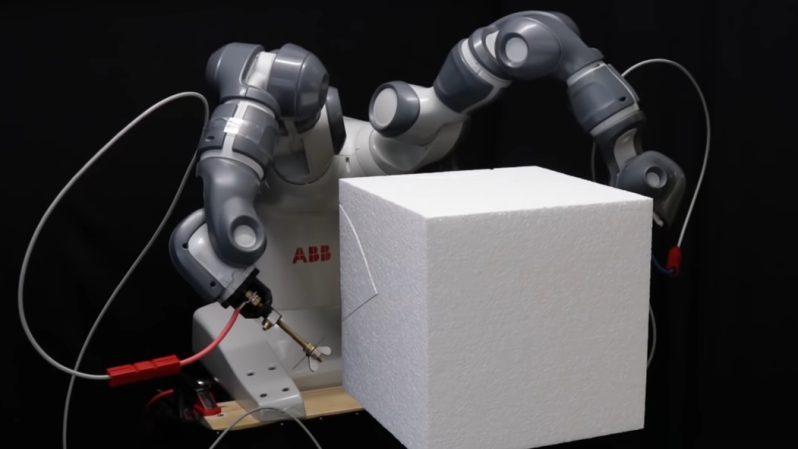
But hot-wire cutters can’t do much other than to make straight cuts, since the wire must be kept taut. “RoboCut”, though, as [Simon Duenser] and his colleagues at ETH Zurich call their creation, suffers from no such limitations. Using an ABB YuMi, a dual-arm collaborative robot, they devised a method of making controlled curved cuts through foam by using a 1-mm thick deformable rod rather than a limp and floppy wire for the cutting tool. The robot has seven degrees of freedom on each arm, and there’s only so much the rod can deform before being permanently damaged, so the kinematics involved are far from trivial. Each pass through the foam is calculated to remove as much material as possible, and multiple passes are needed to creep up on the final design.
The video below shows the mesmerizing sweeps needed to release the Stanford bunny trapped within the foam, as well as other common 3D test models. We’re not sure it’s something easily recreated by the home-gamer, but it sure is fun to watch.
Thanks to [Itay Ramot] for the tip.
[via Gizmodo]













This is rather marvellous.
It seems that it would be well suited to making boat hulls, as it seems to be using a spline (in the original boatbuilding sense) albeit one with only two control points. (Actually I have no real idea how many control points this would be equivalent to as the spline is constrained in 3d space by two points and two vectors)
Or any number of slightly concave wing/surface profiles. Glider wings modeled after birds immediately comes to mind for me. That would be very interesting to see I think.
Wow that is pretty impressive
Impressive!
Nice. Now our new robot overlords can strangle us with a garrotte in the future. :D
At least it cauterizes the wound at the same time, so you don’t bleed on your good shirt or something.
Combine that with some lost-foam casting, and you have yourself a party. Admittedly, my parties are kind of geeky.
Invite me to the next one, please!
Neat idea, the curved cuts look lovely. Wonder how consistent they are. Can see there being lots of fun to be had with a setup like this.
You can get similar results just from the straight tensioned wire and many many cuts – more polyhedral in finish than this. Which is something you can even do by hand with some formers to guide easy enough. Though the number of formers will get stupidly high as the shapes get complex and not all shapes will be possible in one piece of course..
With straight wire you can’t cut concave shapes, though.
The brief realtime shot in there showed the rod actually moving much more slowly than you would normally go with a tensioned wire cutter. I’m not sure they actually needed to account for the pressure against the rod off-axis at that point, so probably pretty repeatable. At least between runs your error would be consistent. :)
And yes, the inside of concave surfaces is also possible this way. Now we could have glider wings mimicking something like an albatross, provided you could also layup your fiberglass inside the concave. That is something I would like to see…
The physics engine they applied still looked like it had a manual component for fitting the cut to the curve, so I think for now we are still safe from our robot overlords. It was still very impressive though to see the rabbit appear after what.. 9 cuts?
Indeed, it probably is quite repeatable – but there are so many factors that will matter to the curvature and its hard to judge how important some of them are till you use it. For example that rod is being flexed and heated quite considerably, so how long before its mechanical properties are altered. Its being heated but not uniformly across its whole length – the bits exposed to air will be cooling differently to the bits doing cutting and the cutting won’t be uniform cooling either with some areas being slower than others so what does that do to its length and bend?
I think from the tiny shot of realtime indicating its really damn slow they will probably get very repeatable results as long as they are not fatiguing the rod by excessive bending. Being so slow the heat effects might be very visible in the part but aught to be the same every time so you could correct for it if you need to.
Concave elements was one of the shape styles I was meaning. But with straight wire even something that isn’t concave can need to be in multiple parts – you have limits to the length and depth of your bow that means you wont always have the reach.
It looked like it was moving slowly, but it as rotating internally to form the sphere.
Anyone else find it weird that they did all that and couldn’t figure out how to automate a turntable.
Probably software guys, it’s an off-the-shelf dual arm robot. (Or the project had no hardware budget, equally likely)
BTW, nobody in the course of ever, has called using one tool with two hands dual wielding.
Little Bobby: “Look ma, no hands”
nobody: “I’m still dual wielding the handlebars.”
Seriously. It’s not dual-wielding. It’s just two-handed. Which is arguably more impressive in a robot context in that it’s not just doing the same sort of thing twice independently, but coordinating between hands.
My feeling is that it’s really two tools connected by a single flexible entity, since the important bit is controlling all 14 degrees-of-freedom that go into making the rod flex in just the right way.
How do you count 14? I can see 10 and possibly 12 if they have been very clever. (And they were clever enough to have the idea….)
There is XYZ for each end of the cutter, and then two angles at each end to “aim” the cutter. For 10.
If they also apply a twist along the wire at each end (which feels like it would help, but that’s intuition not analysis) then there are 12.
From the paper: “Our physical setup consists of a YuMi® IRB 14000, a robot with
two 7-DoF arms”
I would expect that they are programming the robot for end-effector position and angle rather than controlling each joint separately to achieve their wire shape, but you are ahead of me in that you have read the paper rather than just looked at the pictures.
Well this is cool. Now I’m thinking about what kinds of complex metal parts could be done with wire EDM in this fashion. Lots of sharp corners and complex geometry that wouldn’t be easy or possible with traditional milling/turning machine techniques.
I think the issue there would be that in wire edm, the wire is constantly being pulled through as it is partially eroded by the process. That would be much more complicated with a comparatively rigid rod.
This would be sooooo cool for lost wax casting, as a matter of fact you could probably use wax blocks in place of styrofoam so you could reuse the cutoffs, something like this, in some cases, could compete with a 3D printer. Now for the real question, can they get the arms to knit, I have a hole in my sock.
This is exceptionally cool.
Monomolecular wire prosthesis from Johnny Mnemonic instantly comes to mind.
Wow! This got my mind churning in so many ways. Super impressive. A modern miracle of math, science, technology, control systems… Just incredible. wow.
Is such a system available for sale somewhere?