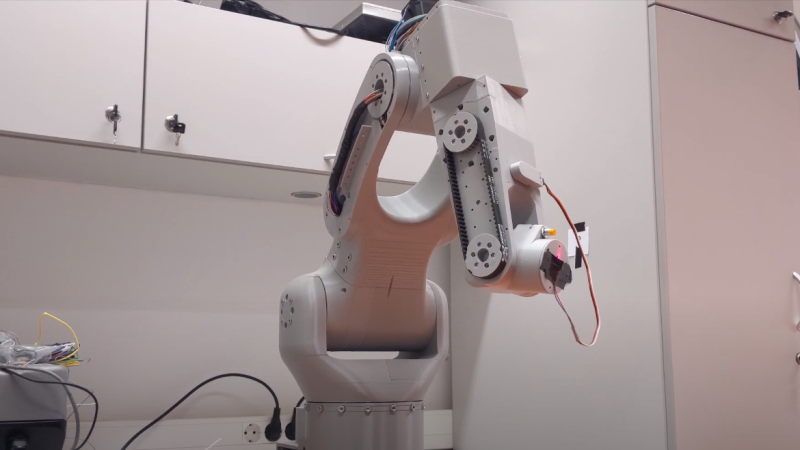
 [Petar Crnjak]’s Faze4 is a open source robotic arm with 3D printable parts, inspired in part by the design of industrial robot arms. In particular, [Petar] aimed to hide wiring and cables inside the arm as much as possible, and the results look great! Just watch it move in the video below.
[Petar Crnjak]’s Faze4 is a open source robotic arm with 3D printable parts, inspired in part by the design of industrial robot arms. In particular, [Petar] aimed to hide wiring and cables inside the arm as much as possible, and the results look great! Just watch it move in the video below.
Cycloidal gearboxes have been showing up in robotic arm projects more and more, and Faze4 makes good use of them. Why cycloidal gears? They are readily 3D printed and offer low backlash, which makes them attractive for robotic applications. There’s no need to design cycloidal gears from scratch, either. [Petar] found this cycloidal gear generator in OnShape extremely useful when designing Faze4.
The project’s GitHub repository has all the design files, as well as some video demonstrations and a link to assembly documentation for anyone who would like to make their own. Watch Faze4 go through some test movements in the video embedded below.
Cycloidal gearboxes, which have similarities to both planetary gearing and strain-wave gears, can be mesmerizing to watch. Check out our previous coverage for more information on what they are and how they work.














The title photo made me think of a robotic chainsaw in a dentist’s office!
Refreshing to see a DIY robotic arm that doesn’t shake like it has a very bad case of Parkinson’s.
Rigid frame, tight gearing, and smooth motor control are all difficult to achieve on a typical hobbyist budget.
That’s why this one costs at least $1,000. Cheap for the quality, but still a bit much for an individual. For a school, on the other hand, this is a really ideal project.
Usually what you see is the cheapest servos you can find on Ebay being used to control long and flimsy arms. So just breathing on them get things shaking. I’m sure something could be built for not a ton of money that is a bit more stable.
IMO motors are the weak link in ultra-low-budget robot arms. Here are the standard options:
* RC Servos: Controlling their speed is not trivial. So the frame has to be rigid enough to handle sudden starts/stops. But this adds mass, making the arm too heavy for the weak motors. Also, most are not precise enough for robot arms.
* Steppers: They’re not closed-loop. When starting the robot, the controller doesn’t know the robot’s position. This can be solved by endstops, or by remembering the position when the robot was turned off. Neither option is ideal. A better option is an encoder. But standard rotary pots are too imprecise. (I got a very public lesson in this a few years ago.) Optical encoders are better, but not cheap.
* Geared DC motors: They’re not closed-loop, so they have the same problems as steppers.
* Smart servos: they’re expensive, and only a few companies make them. Some have weird connectors that require specialized (and expensive) controllers.
Roboticists must either buy expensive robot motors, or cheap motors that require expensive add-ons like encoders. IMO the best way to get accuracy without paying much is to use steppers. But the lack of closed-loop control makes them dangerous. So I can’t fault this project for costing $1,000; I don’t see a way to drop the price much without making major compromises.
Closed loop steppers are nearly as cheap as normal steppers when you get to mid-range nema23 or above. Combine that with something like smoothieboard, and you’ve got closed loop at very close to the usual price of steppers.