Tracked robots usually require at least two wheels inside to work properly. However, [James Bruton] discovered a curious tractor design from the 1940s, the Fordson Rotaped, which only uses a single sprocket wheel inside each track. Being [James], he built a self-balancing robot around the rotaped concept.
Instead of a lot of short track sections, the Rotaped uses six long sections of track, about the same length as the wheel’s diameter. To keep the track on the wheel, a series of chains or an oval frame is used on the inside of the track.
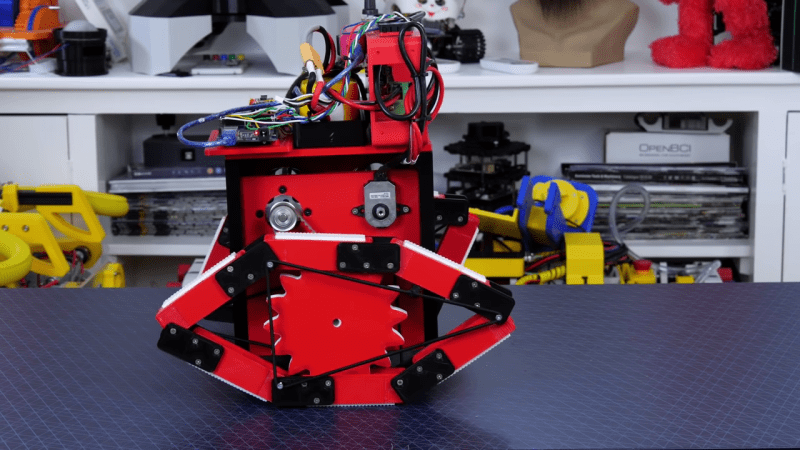
As is usual for [James]’ projects, most of the mechanical parts are 3D printed. To hold the tracks in place, he stretches a bungee cord loop around three points on each side of the track. To make things more interesting, he made the robot balanced on the tracks. This took a bit of PID tuning to get working without oscillations, since the wheels experience a slight cogging effect inside the tracks. The wheels are driven by a pair of brushless motors with O-Drive controllers. The balancing is handled by an Arduino Mega, which reads processed position values from an Arduino Pro Mini connected to an MPU6050 IMU.
This might be a viable alternative to conventional tracks for certain applications, and the reduced part count is certainly an advantage. Let us know in the comments if it spawns any ideas. [James] has previously built another tracked rover, which uses flexible 3D printed track sections. By far, the biggest 3D printed tracked vehicle we’ve seen was [Ivan Miranda]’s ridable tank.














I’d never seen a rotoped before and I wonder why they aren’t more popular. Mechanical wear, I’d guess.
Another excellent robot.
Reminds me of the so-called Dreadnaught Wheel.
https://en.wikipedia.org/wiki/Dreadnaught_wheel
Did not know about them. Thanks!
I was hoping he’d take it offroading.
For those who are looking for more information, the tractors in question at the start of the video were most likely Fordson (the original name of the Ford company) tractors with aftermarket conversions to handle Howard Rotopads.
The company making these was based in England, and I don’t think ever made it big (dates of operation seem to be pegged around 1960s-1970s), I’m not sure if the name of the company was Howard or not, as the few manufacturer details I found peg the company as the Howard company based in Belford, Belfordshire, England. And while there was in fact a steam engine company based in Belford called the Howard company, it went out of business in the 1920’s…. so it may have been a case of these being sold as ‘Howard Rotopads’ by another company, using their patents.
Do you mean “Bedford, Bedfordshire”? There is a small village named Belford, but it’s in Northumberland. I don’t think there’s ever been a county named Belfordshire.
Yeah, brain fart there. Sorry.