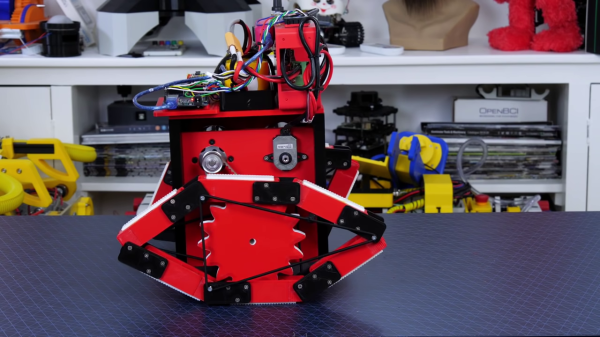
The automatic transmission in your average automobile can be a complicated, hydraulic-y thing full of spooky fluids and many spinning parts. However, simpler designs for “automatic” gearboxes exist, like this Lego design from [FUNTastyX].
The build is based around a simple open differential but configured in a unique way. A motor drives what would typically be one of the output shafts as an input. The same motor is also geared what would normally be the main differential input shaft as well. In these conditions, this double-drive arrangement would sum the speed input and lead to a faster rotational speed at the other shaft, which becomes the output.
However, the trick in this build is that the drive going to what would be the usual differential input is done through a Lego slipper clutch. This part, as explained by [TechnicBricks], allows the outer teeth of the gear to slip relative to the shaft once torque demand is exceeded. What this functionally does is that when the output of the “automatic gearbox” is loaded down, the extra torque demand causes the clutch to slip. This then leads to only one input to the differential doing any work, changing the gear ratio automatically.
It’s likely not a particularly efficient gearbox, as there are significant losses through the very simple clutch, we suspect. However, it does technically work, and we’d love to see its performance rated directly against other simple Lego gearbox designs.
It’s a little confusing to explain in text, but the video from [FUNTastyX] does a great job at explaining the principle in just a few minutes. We’ve seen plenty of crazy Lego gearboxes over the years, and we doubt this will be the last. Video after the break.