It’s not uncommon to see a tracked robot build on these pages, but it’s fair to say that many of them are somewhat on the small side. That was where [iforce2d] started, but the idea of making a more capable version just wouldn’t go away. Thus, he’s come back and made what looks to be a very promising, fully capable outdoor RC tank chassis, one that, within reason, we think should eventually be able to go anywhere.
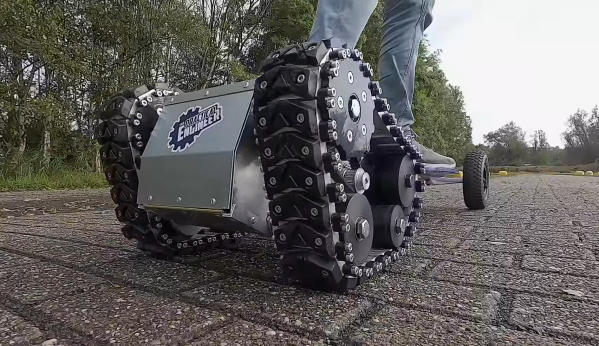
For plenty of power, he’s using a pair of hoverboard motors with a chain reduction drive and in turn, a couple of shafts to the tracks. The chassis is a TIG-welded aluminium affair, while the tracks are an early incarnation with machined MDF drive wheels and a homemade tread. The suspension is a work of machined-aluminium art, though, and while there are teething troubles as he takes it for a spin, we can see plenty of potential as its deficiencies are ironed out. Take a look at it in the video below the break.
If large-size R/C tanks are your thing, we have another for you to look at.
Continue reading “An RC Tank Chassis That’s Not Messing About”