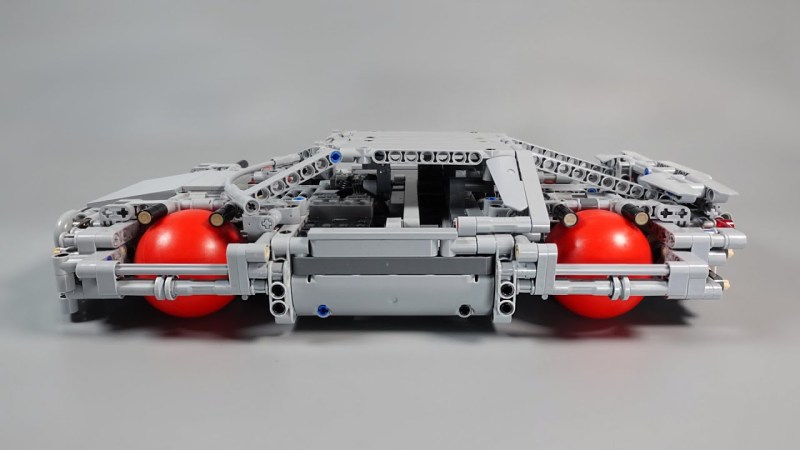
Wheels are typically just simple cylinders, though fans of I, Robot (2004) may have admired the handsome vehicle featuring ball wheels that was driven by the protagonist. YouTuber [Brick Technology] decided to evaluate the use of spherical wheels with a Lego car design.
The benefit of ball wheels is that they can turn in multiple directions when driven on different axes, with the benefit of improved maneuverability. With a set of drive rollers spring loaded with rubber bands pushing against the 52mm Duplo spheres, the ball wheels can be rotated both forward and back as well as left and right. This gives the Lego car a rather neat strafing ability, as well as the ability to spin on the spot or steer in a more traditional fashion. The car is controlled via smartphone, thanks to BuWizz modules that allow remote control of the Lego motors.
Ball wheels are unlikely to catch on in mainstream automobiles; the mechanical complexity required to drive them makes such designs impractical for cars. However, omniwheels and similar designs have found some applications on forklifts and other such slow-speed applications where the ability to move in any direction is very useful. Video after the break.













So, instead of a mouse with one ball clogging up every few days, you now have a car with 4 balls that clogging up every few days. :)
Typically in those old school mouse wheels, it was the rollers that got gunked up instead of the actual ball. This probably had something to do with the crap embedded in the plastic due to the friction or something. I’m not sure if this same thing would happen with different materials like metal or something.
Back in 1985 or so with an original Macintosh, I quickly discovered that using a plain piece of paper as a “mouse pad” would remove the gunk from the ball, which would then be able to pull more gunk off of the rollers. The paper would quickly look horrible, but the mouse would become cleaner as you used it. It was a great lazy solution to the problem, but still surprising that a clean enough ball would remove gunk from the rollers.
All that gunk looked like sweat and skin cells caked onto the rollers from what I remember. It picks it up with dust on the mousepad/tabletop, and it is easily scrapped off with a fingernail. I’m sure the microfissures in the surface of the plastic gave it a place to latch on and begin collecting.
I’m not sure how it can be prevented. Maybe make the rollers contact the ball using less surface area? Probably much harder to keep aligned than just scraping the crap off with your finger.
I bet metal would have the same problem. The rollers seem to be a different type of plastic than the tension roller (?? that little one off diagonally between the two bigger rollers), and they all got caked up.
I still have a cleaner kit. Desktop support at your service. It consists of a mouse pad covered in Velcro loops and various sized balls that are covered with tiny hooks. You squirt a bit of alcohol on the ball,pop it in the mouse then slide the mouse around on the pad and recoil in horror at the amazing amount of dark gray toejam made of sebum and dead skin cells and dead dust mites and ancient Cheeto dust and boogers.
The contact patch is a tad small. Maybe with a low pressure tire… hmmm. It would redefine radial tires, from a cord-winding exercise point of view. I think I like Batman’s dualies that rotated laterally in emergencies.
Neat build with Legos. While impractical for real (at this time), looks like it was a fun project for fun. I suppose some things could be worked out like anti-static ball material, a brush to remove dirt, how to handle uneven wear on the ball wheels, etc. Anyway impressed!
The spheres would present a smaller contact area to the ground compared with a wheel/tire. Stopping, cornering and accelerating would be poor.
Tread pattern could not be designed to efficiently expel water in every orientation unlike a wheel/tire. Hydroplaning would be fait accompli in wet weather.
Braking and steering relies on the limited contact area between the rollers and the sphere (forget about ABS as an option) and road surface water would reduce the friction further (also affecting acceleration)
Parking and setting off on a hill may not be possible in wet weather due to slippage between the rollers and the spheres.
Reducing speed/stopping whilst going down hill may not be possible in wet weather.
Caster angle would not apply so steering would not self centre.
Constant direction journeys would leave the spherical wheels no longer spherical, as they would tend to spin in one orientation (tread would be uneven)
Wear and tear would be hard to measure, so safety would be compromised.
Punctures would result in the under carriage dragging on the ground (there is no solid wheel in the middle to prevent that)
Where would you keep a spare sphere (Not inflated to save space, so you would need to inflate it)
The spheres could be stolen by dragging them out of the wheel arches.
If a vehicle’s suspension only relied on the deformation of the spheres for comfort/handling then it would be from the top of the sphere rather than from a spring and shock absorber and the outer diameter of a wheel, to the outer diameter of the tire. The spheres would have to maintain very high internal pressures and still be compliant. Too soft and the vehicle would bottom out. Too hard and the ride quality would be very bad. Getting and keeping all four spheres the same pressure would be difficult (heat from road and roller friction would cause the spheres to expand)
Checking the spheres for damage and nails/screws stuck in them would not be possible over the entire surface before the start of a journey.
Vehicles would have to be wider to accommodate the spheres than wheel based cars, or passenger room would be compromised.
But apart from that it’s a good idea
But apart from that! What have the Romans ever done for us?!
Many of those flaws are trivial to fix or don’t really apply anyway – self centering steering for instance, when the steering isn’t moving anything mechanically as it is just an electric signal just adding a spring to the steering wheel – then the input self centers just fine.
I do agree tyre contact area could be an issue, but then again if you scale this up and build it with any form of flex/give in the outer surface it could easily end up with more contact area than a conventional wheel…
The constant directional travel is also a valid point – though easily corrected the car’s computer can wear level the tyre without changing direction of travel by playing pairs of wheels off against each other a little and constantly changing which direction each ball is spinning..
It is however a completely daft concept to try and make human scale – the wheel ball would have to be huge and heavy, so having functional suspension and any space for occupants would be a real challenge…
“self centering steering” is not just a spring that pushes the steeling wheel back to centre position. It’s actual mechanical feedback from the road. That why e.g. many people haven’t learned to reverse in a straight line – because the wheel tends away from centre instead of towards. If you’re driving, for example, on a slope / round a bend / over a bump, the steering wheel gives haptic (maybe that’s the wrong word) feedback about the force the road is exerting on the car’s wheel, to your hands.
Ah I see what you mean, yes the haptic feedback of the road state would be different – but then that is also correctable, make the drivers inputs a force feedback gaming wheel and it can create any feel you want.
However not having any feedback as the whole car is electronically steered probably won’t matter – the car will go dead straight (at least within its dead-reckoning precision) because that is what the user input tells it to do.
You clearly had a ball coming up with that list. ;-)
And kept it rolling!
All the problems based on a pneumatic tire being run by rollers are moot… there’s no way this would ever run on big round tire-balloons (susceptible to punctures etc) and the drive mechanism would most likely be magnetic, as well as 100% computer controlled, so no mechanical self-centering issue either… but the MOST likely scenario is that this concept will never make it to mainstream vehicles. =\
Impressed with both the op and this detailed evaluation
Nice summary! Recall what was supposed to be in great glass ball driven trains speculated in the 1920s and 30s? Gyros? Magnetic monopoles? The Fusion? All more intuitive than Syd Mead’s spinner wheels (again, providing lift as well as orientation.)
That is the correct silhouette for an automobile, bravo!
Driving demo @ 12:09…
https://youtu.be/5p-B51FKEps?t=544
https://youtu.be/5p-B51FKEps?t=544
grabcad.com/library/omnidirectional-aerodynamic-electric-motor-1
https://drive.google.com/file/d/1-rQXqe2JkA4LdWfsEF5AY0zghStt-C7Q/view
https://drive.google.com/file/d/1LhcS7Cbd8j-6moqU6ZBT5Q0evP57hJrc/view?usp=sharing
di.lucasdublanc@gmail.com
LinkedIn: Dublanc Lucas Martin
https://youtube.com/watch?v=EaJdN4A8hwY&t=198s
https://linkedin.com/feed/update/urn:li:activity:6837426375159250944/
https://twitter.com/LucasDublanc1
grabcad.com/library/omnidirectional-aerodynamic-electric-motor-1
https://drive.google.com/file/d/1-rQXqe2JkA4LdWfsEF5AY0zghStt-C7Q/view
https://drive.google.com/file/d/1LhcS7Cbd8j-6moqU6ZBT5Q0evP57hJrc/view?usp=sharing
di.lucasdublanc@gmail.com
LinkedIn: Dublanc Lucas Martin
https://youtube.com/watch?v=EaJdN4A8hwY&t=198s
https://linkedin.com/feed/update/urn:li:activity:6837426375159250944/
https://twitter.com/LucasDublanc1