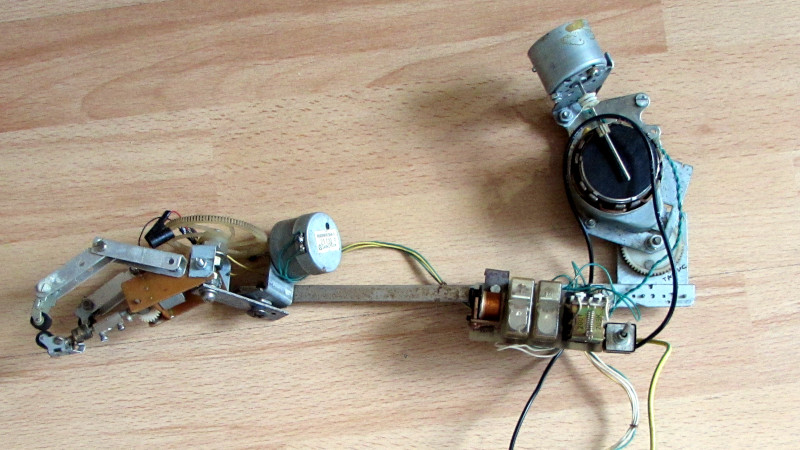
With laser cutters and 3D printers in our arsenal as well as the global toy shop of mass-produced parts and single-board computers, building a robotic project has almost never been easier. In times past though, there was more of a challenge, with a computer likely meaning a chunky desktop model and there being no plethora of motors at low prices, a robot arm required more ingenuity. [Marius Taciuc] shares with us an arm he built from the most minimal of parts back in 2003, and it’s a beautiful exercise in creative reuse.
The arm itself uses metal and FR4 for its structure, and borrows extensively from cassette tape mechanisms for motors and gears. The stronger motor for the forearm is a geared unit from a heating system, and to control all this, a relay board is hooked up to a computer’s parallel port. This last assembly is particularly ingenious, having no optocouplers handy he made his own by coupling LEDs to metal can transistors with their lids removed.
The arm was entered in a competition, and he relates a tale with which we’ll all be familiar — at the critical moment, it didn’t work. Fortunately a last-minute accidental covering of the board with a floppy disk solved the problem, as it turned out that enough light was leaking into those home-made optocouplers to trigger them. The prize was won not just on the strength of the arm, but on his explanation of the lessons learned along the way.
The once-ubiquitous parallel port is now absent from most computers, but there’s still plenty of scope for experimentation if you have one.














Byte in the early days would provide background. So articles about how speech us made in the body, or background about barcodes. The notion of robots was “hot” from fairly early on. So there were articles about RC servos, before there were robot construction articles.
I’ve been meaning to slap an i2c gpio chip on an hdmi plug and get my parallel port back
Why not just use one of the multiple types of usb to GPIO boards? Or just program a microcontroller to behave as one?
I have two main reasons:
The latency of usb2 – you’re limited to 1kHz or 8kHz polling on the bus, so in my understanding that’s io reads no faster than 500Hz/4kHz.
The reliability: my robots through either motion or EMI manage to foul the connection and I lose devices, then they either dont come back until theyre power cycled (looking at you intel realsense) or they come back as “different” devices (ttyUSB0 is now ttyUSB1).
So that’s lead me to be interested in exploiting the i2c onboard the PC, I’d like to know more about how fast I can drive it. I’ve actually a neat napkin design for a watchdog “pcie” card that uses an rpi2040 and the i2c on that connector for communications.
Hey, Bryantherobotman I had a similar idea but with VGA a while back. Plus most if not all older laptops have VGA and the port is mechanically stronger. Easy enough to stick an LM1881 on there and recover useful data from the VSync and HSync (remember sync-on-green?) 7 pins good enough for you?
Just have a small window on your screen up on the top left corner and feed it commands.
In my box of stuff I have many small motors and drive chains so if you can make use please message me.
Oh man another side project was to use vga outputs for some direct synthesis radio. 1920x1080x60 gives you three analog channels at 124MHz sample clock. Am radio would be a win and I think I could mess around with 27MHz rc cars too.
Interesting, incidentally an old school version of “multimode” robot hands uses micro servos made from optical drive parts and muscle wire.
Main problem with nitinol if anyone here has ever used it, is that it doesn’t respond well to overcurrent.
The trick is to pre form it around a ceramic soldering iron element and apply heat carefully, setting it in its desired shape.
Amazing! It’s fascinating to see how much creativity and ingenuity people put into building homemade robot arms before the advent of readily available DIY robot kits. From using PVC pipes and syringes to pneumatically control the movements, to repurposing old printers to build articulated arms, these early inventors were true pioneers of the DIY robotics scene. It’s inspiring to think about the possibilities that open up when people tinker with technology and apply their imaginations to create new solutions.
He built the arm in 2003, 20 years ago…
It was 20 years ago, today, Marius Taciuc taught this arm to play.
Marius Taciuc’s Robot Arms Club Band. ;)
Although laptops don’t have the ports anymore, many desktop motherboards do still include headers for traditional serial and parallel connections, to which a port can be added.