Move over Claude Monet, there is a new act in town in the form of a robot capable of creating some pretty cool art.
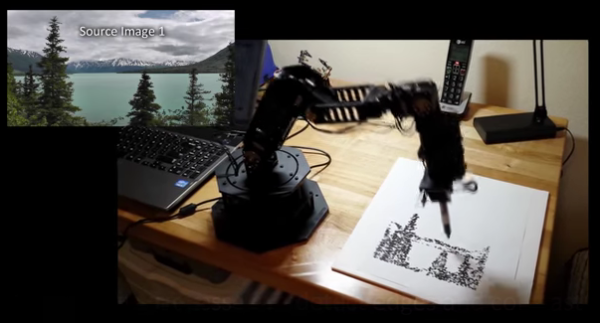
We’ve seen robotic artists before but most of them are either cartesian-based or hanging drawbots. This is a full-fledged Sharpie-wielding robotic arm that draws with dots giving its work an impressionistic feel.
The actual robotic arm is a stock Interbotix WidowX. The folks over at Phantom Multimedia wrote some custom software that takes a graphic and breaks it down into a 1-bit representation. The code then goes through the bitmap at random, picking points to draw on the medium. The hard part of this project was figuring out how to translate the 2D image into 3D robotic arm movements. Since the arm has several joints, there are multiple mathematical solutions for arm position to move the marker to any given point. The team ended up writing an algorithm to determine the most efficient way to move from point to point. Even so, each drawing takes hours.
As if that wasn’t enough, the software was then reworked to probe positions. Instead of automatically moving the arm to a predetermined point, the arm is manually moved to a location and the data retrieved from the servo encoders is used to determine the position of a probe at the end of the arm. Each point taken in this manner can then be combined to generate a 3D model.
Continue reading “Watch Out Artists, Robots Take Your Job Next”