[Ultimate Robotics] has been working on designing and producing an extremely small ECG that can stream data real time.
Typical electrocardiogram equipment is bulky: miniaturization doesn’t do much for a hospital where optimizations tend to lean towards, durability, longevity, and ease of use. Usually a bunch of leads are strung between a conductive pad and an analog front end and display which interprets the data; very clearly identifying the patient as a subject for measurement.
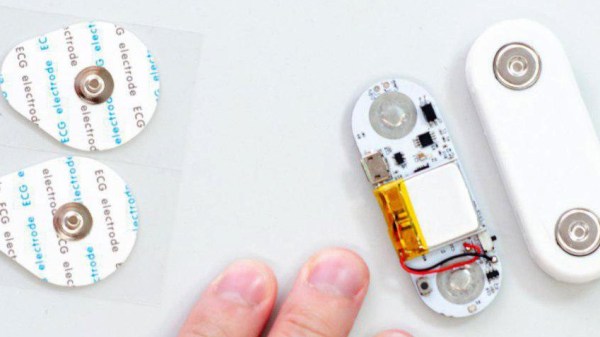
uECG puts all this in a finger sized package. It’s no surprise that this got our attention at Maker Faire Rome and that they’re one of the Hackaday Prize Finalists. The battery, micro controller, and sampling circuitry are all nearly packed onto the board. The user has the option of streaming through BLE at 125 Hz or using a radio transceiver for 1 kHz of data. Even transmitting at these sample rates and filtering the signal of unwanted noise the device draws less than 10 mA.
The files to make the device are all on their page. Though they are planning to produce the boards in a small run which should be the best way to acquire one and start experimenting with this interesting data.