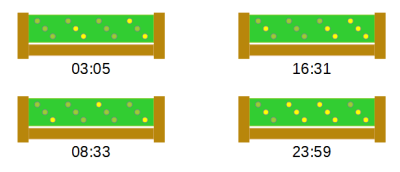
Over on Hackaday.io, [danjovic] presents clOCkTAL, a simple LED clock for those of us who struggle with the very concept of making it easy to read the time. Move aside binary clocks, you’re easy, let’s talk binary coded octal. Yes, it is a thing. We’ll leave it to [danjovic] to describe how to read the time from it:
Do not try to do the math using 6 bits. The trick to read this clock is to read every 3-bit digit in binary and multiply the MSBs by 8 before summing to the LSBs.
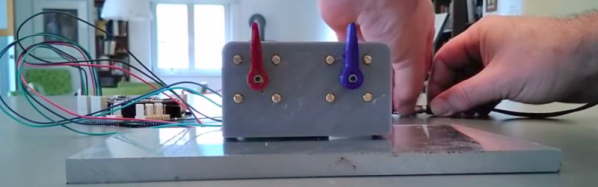
Simple. If you’re awake enough, that is. Anyway, we’re a big fan of the stripped-down raw build method using perf board, and scrap wood. No details hidden here. The circuit is straightforward, being based on a minimal configuration needed to drive the PIC16F688 and a handful of LEDs arranged in a 3×4 matrix.
An interesting detail is the use of Bresenham’s Algorithm to derive the one event-per-second needed to keep track of time. And no, this isn’t the more famous Bresenham’s line algorithm you may be more familiar with, it’s much simpler, but does work on the same principle of replacing expensive arithmetic division operations with incremental errors. The original Bresenham’s Algorithm was devised for using with X-Y plotters, which had limited resolution, and was intended to allow movements that were in an imperfect ratio to that resolution. It was developed into a method for approximating lines, then extended to cover circles, ellipses and other types of drawables.
Continue reading “ClOCkTAL: For When Reading A Clock Is Just Too Easy”