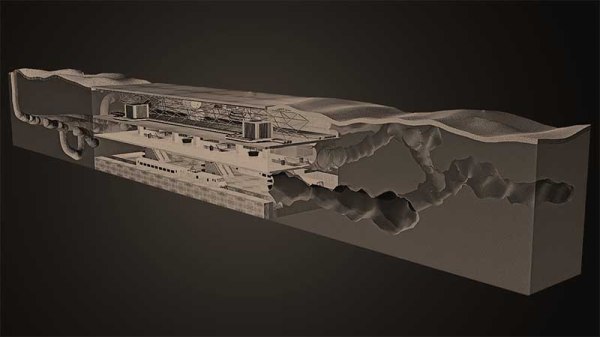
After extracting all the useful stuff from a mine, you are often left with a lot of empty subterranean space without a clear purpose. This was the case with the Bethany Falls limestone mine, near Kansas City, Missouri, which left a sprawling series of caverns supported by 16′ (4.9 meter) diameter pillars courtesy of the used mining method. As detailed by [Benjamin Hunting] in a recent article on the Hagerty site, this made it a fascinating place for a business complex development now called SubTropolis that among other things is used for car storage by Ford and long-term stamp storage by the US Post Office. (Check out their cool period photos!)
The reason for this is the extremely stable climate within these man-made caverns, with relative humidity hovering around a comfortable 40% and temperatures stable year-round at about 21 °C (70 °F), making it ideal for storing anything that doesn’t like being placed outdoors, while saving a lot on airconditioning costs. With Ford one of the biggest companies in SubTropolis, this means that many companies providing customization services for vehicles have also moved operations inside the complex.
With the only negative being a lack of daylight, it seems like the perfect place for many businesses and (evil) lairs, assuming electrical power and constant air circulation are provided.
Featured image: “Subtropolis” by [ErgoSum88]