Forget sourcing parts for your next project from some fancy neighborhood hardware store. If you really want to show your hacker chops, be like [HomoFaciens] and try a Dumpster dive for parts for a CNC machine build.
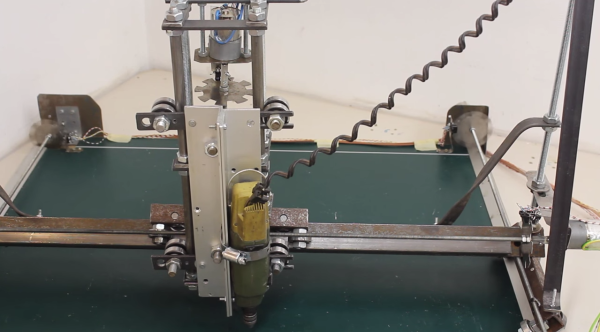
OK, we exaggerate a little – but only a little. Apart from the control electronics, almost everything in [HomoFacien]’s build could be found by the curb on bulk-waste pickup day. Particle board from a cast-off piece of flat-pack furniture, motors and gears from an old printer, and bits of steel strapping are all that’s needed for the frame of a serviceable CNC machine. This machine is even junkier than [HomoFacien]’s earlier build, which had a lot more store-bought parts. But the videos below show pretty impressive performance nonetheless.
Sure, this is a giant leap backwards for the state of the art in DIY CNC builds. but that’s the point – to show what can be accomplished with almost nothing, and that imagination and perseverance are more important for acceptable results than an expensive BOM.
With that in mind, we’re throwing down the gauntlet: can anyone build a CNC machine from cardboard and paperclips?