If your interest lies with robotics there are a multitude of different platforms for you to build. [Teemu Laurila] was frustrated with what was on offer, so designed his own with four-wheel double wishbone suspension and mecanum wheels for maximum flexibility.
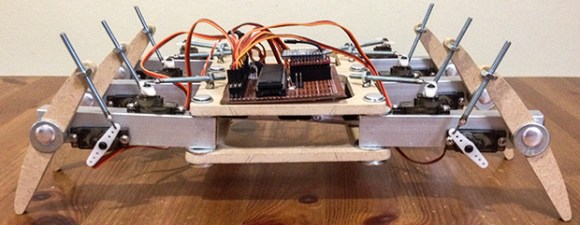
It’s a design that has been through multiple revisions since its first iteration in 2015, and along the way it’s clear some thought has gone into it. That double wishbone suspension features an angle for a high ground clearance, and is fully sprung. Drive comes from small motor/gearboxes at each axle. The chassis meanwhile has plenty of space for a single-board computer, and has been specifically designed with the BeagleBone Black in mind.
This build isn’t fully DIY, as the mecanum wheels appear to be off-the-shelf items, but the rest of the project makes up for this. If you need to make your own, it’s hardly as though there aren’t any projects from which you can borrow components.
Continue reading “A 3D-Printable Mecanum Wheeled Robot Platform”
 First up in the ‘real life science fiction’ category is
First up in the ‘real life science fiction’ category is