
When we think of assistive prostheses or braces, we often think of hard and rigid contraptions. After all, it wasn’t that long ago that prosthetic limbs were still being made out of wood. Even devices made of more modern materials tend to have a robotic quality that inevitably limits their dexterity. However, advancements in soft robotics could allow for assistive devices that more closely mimic their organic counterparts.
At Supercon 2023, Benedetta Lia Mandelli and Emilio Sordi presented their work in developing soft actuator orthosis — specifically, a brace that can help tetraplegics with limited finger and thumb control. Individuals with certain spinal cord injuries can move their arms and wrists but are unable to grasp objects.
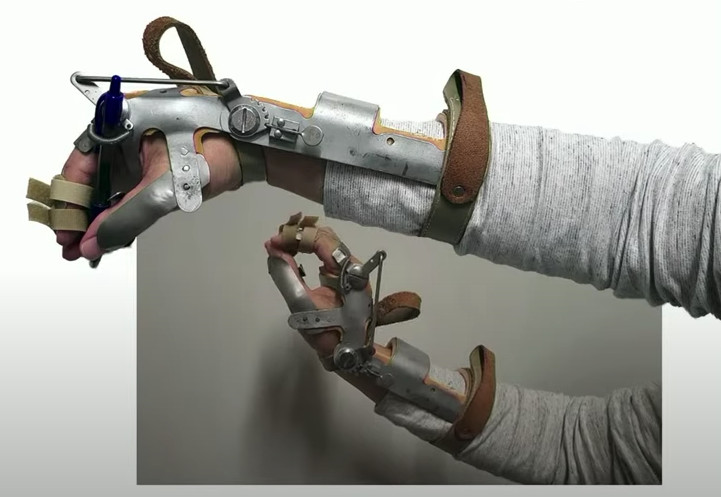
Existing braces can help restore this ability, but they are heavy and limited by the fact that the wearer needs to hold their wrist in a specific position to keep pressure on the mechanism. By replacing the rigid linkage used in the traditional orthosis, the experience of using the device is improved in many ways.
Not only is it lighter and more comfortable to wear, but the grip strength can also be more easily adjusted. The most important advancement however is how the user operates the device.
Like the more traditional designs, the wearer controls the grip through the position of their wrist. But the key difference with the soft actuator version is that the user doesn’t need to maintain that wrist position to keep the grip engaged. Once the inertial measurement units (IMUs) have detected the user has put their wrist into the proper position, the electronics maintain the pressure inside the actuator until commanded otherwise. This means that the user can freely move their wrist after gripping an object without inadvertently dropping it.
Continue reading “Supercon 2023: Soft Actuators As Assistive Tech”










