For all the work done since the dawn of robotics, there is still no match for the human hand in terms of its dexterity and adaptability. Researchers of the IRIM Lab at Koreatech is a step closer with their ingenious BLT gripper, which can pinch with precision or grasp a larger object with evenly distributed force. (Video embedded below.)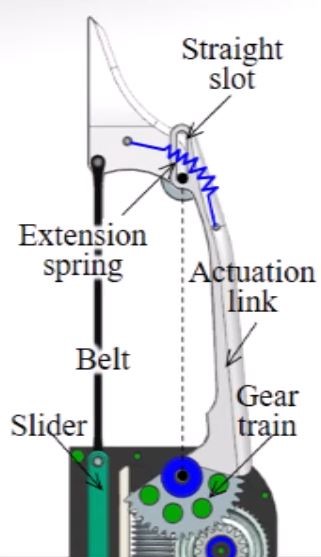
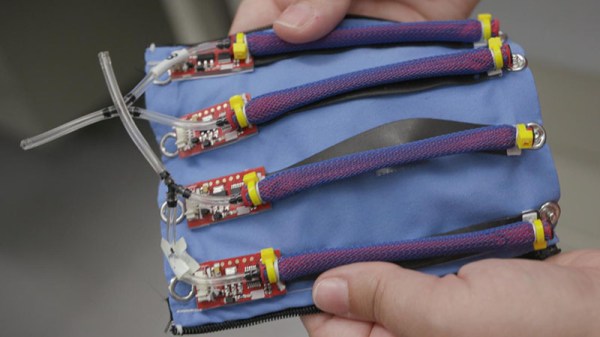
The three fingered gripper is technically called a “belt and link actuated transformable adaptive gripper with active transition capability”. Each finger is a interesting combination of a rigid “fingertip” and actuation link, and a belt as a grasping surface. The actuation link has a small gearbox at it’s base to open and close the hand, and the hinge with the “fingertip” is spring-loaded to the open position. A flexible belt stretches between the finger tip and the base of the gripper, which can be tensioned to actuate the fingertip for pinching, or provide even force across the inside of the gripper for grasping. Two of the fingers can also rotate at the base to give various gripper configurations. This allows the gripper to be used in various ways, including smoothly shifting between pinching and grasping without dropping a object.
We love the relative simplicity of the mechanism, and can see it being used for general robotics and prosthetic hands, especially if force sensing is integrated. The mechanism should be fairly easy to replicate using 3D printed components, a piece of toothed belt, and two cheap servos, so get cracking! Continue reading “Gripper Uses Belts To Pinch And Grasp”