What the heck is a Zooid? A Zooid is a small cylindrical robot, measuring 26 mm in diameter and 21 mm in height, weighting about 12g. Each robot is powered by a 100 mAh LiPo battery and uses motor driven wheels — and these things are snappy at a top speed of about 0.5m/s. Each Zooid is able to know if you touched it via capacitive touch sensing. It has wireless capabilities through an NRF24L01+ chip. So, what’s it for, you wonder…
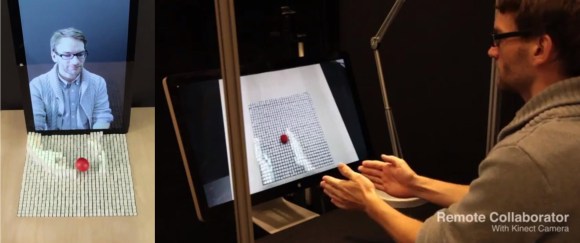
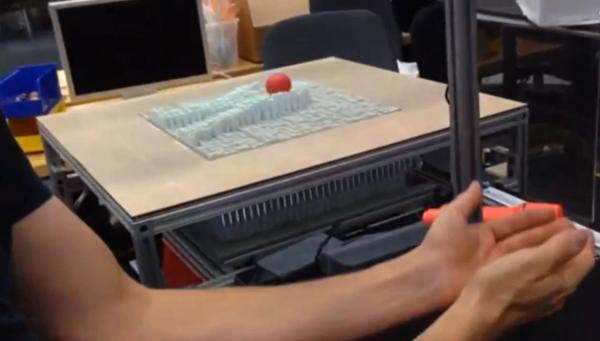
 One robot might not do much but the idea behind the Zooids is the introduction of swarm user interfaces, a new class of human-computer interfaces that involves multiple autonomous robots to handle both display and interaction. In a joint work between the Shape Lab at Stanford University (USA) and the Aviz team at Inria (France), researchers developed an open-source open-hardware platform for what they called “tabletop swarm interfaces”. The actual interface involves a swarm of Zooids, a radio base-station, a high-speed DLP structured light projector for optical tracking and a software framework for application development and control.
One robot might not do much but the idea behind the Zooids is the introduction of swarm user interfaces, a new class of human-computer interfaces that involves multiple autonomous robots to handle both display and interaction. In a joint work between the Shape Lab at Stanford University (USA) and the Aviz team at Inria (France), researchers developed an open-source open-hardware platform for what they called “tabletop swarm interfaces”. The actual interface involves a swarm of Zooids, a radio base-station, a high-speed DLP structured light projector for optical tracking and a software framework for application development and control.
In the demonstration video we can see some examples of use of the Zooids. Could the resolution be measured as, erm, ZPI? Near the end of the demo we can see a new level of interactivity where the swarm quickly works together as a team and sort of fetch the user’s phone. Now, if they can be made to scour the house in search of our keys, that would be something…