
In recent years small drones have gone from being toys and photography tools to a deadly threat on the battlefield. Kamikaze drones have become especially prominent in the news due to their use in the war in Ukraine by both sides. While we haven’t seen coordinated swarms being actively employed on the modern battlefield, it’s likely only a matter of time, making drone swarm defense an active field of development in the industry.
The US Air Force Research Laboratory recently conducted tests and a demonstration of an anti-drone weapon that uses pulses of high-power microwave energy to fry the electronics of a swarm of drones. Named the Tactical High-power Operational Responder, or THOR (presumably they picked the acronym first), it’s housed in a 20ft shipping container with large microwave antenna on top. The form factor is important because a weapon is only useful if it can reach the battlefield, and this can fit in the back of a C130.
THOR likely functions similarly to a shotgun, with a relatively large effective “beam.” This would have added advantages like frying multiple drones with one pulse and not needing pinpoint tracking and aiming tech required for projectile and laser-based weapons. Depending on its range and directivity, THOR might come with the downside of collateral damage to electronics close to its line of fire.
Drone swarms are of course the other side of this arms race, but fortunately they also have non-destructive uses like lights shows and perhaps even 3D printing.

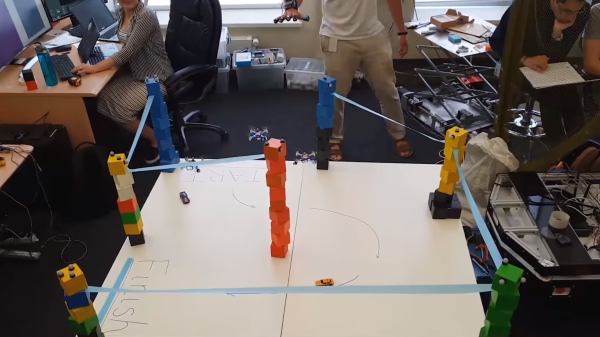



 One robot might not do much but the idea behind the Zooids is the introduction of swarm user interfaces, a new class of human-computer interfaces that involves multiple autonomous robots to handle both display and interaction. In a joint work between the Shape Lab at Stanford University (USA) and the Aviz team at Inria (France), researchers developed an
One robot might not do much but the idea behind the Zooids is the introduction of swarm user interfaces, a new class of human-computer interfaces that involves multiple autonomous robots to handle both display and interaction. In a joint work between the Shape Lab at Stanford University (USA) and the Aviz team at Inria (France), researchers developed an 








