
Microsoft is bringing ROS to Window 10. ROS stands for Robot Operating System, a software framework and large collection of libraries for developing robots which we recently wrote an introductory article about, It’s long been primarily supported under Linux and Mac OS X, and even then, best under Ubuntu. My own efforts to get it working under the Raspbian distribution on the Raspberry Pi led me to instead download a Pi Ubuntu image. So having it running with the support of Microsoft on Windows will add some welcome variety.

To announce it to the world, they had a small booth at the recent ROSCon 2018 in Madrid. There they showed a Robotis TurtleBot 3 robot running the Melodic Morenia release of ROS under Windows 10 IoT Enterprise on an Intel Coffee Lake NUC and with a ROS node incorporating hardware-accelerated Windows Machine Learning.
Why are they doing this? It may be to help promote their own machine learning products to roboticists and manufacturing. From their recent blog entry they say:
We’re looking forward to bringing the intelligent edge to robotics by bringing advanced features like hardware-accelerated Windows Machine Learning, computer vision, Azure Cognitive Services, Azure IoT cloud services, and other Microsoft technologies to home, education, commercial, and industrial robots.
Initially, they’ll support ROS1, the version most people will have used, but also have plans for ROS2. Developers will use Microsoft’s Visual Studio toolset. Thus far it’s an experimental release but you can give it a try by starting with the details here.
[Main Image Credit: Microsoft]
 Building a robot can be very simple — assembling pre-configured parts or building something small, quick, and cute — or it can be an endeavour that takes years of sweat and tears. Either way, the skills involved in building the ‘bot aren’t necessarily the same as those it takes to program the firmware that drives it, and then eventually the higher-level software that makes it functional and easy to drive.
Building a robot can be very simple — assembling pre-configured parts or building something small, quick, and cute — or it can be an endeavour that takes years of sweat and tears. Either way, the skills involved in building the ‘bot aren’t necessarily the same as those it takes to program the firmware that drives it, and then eventually the higher-level software that makes it functional and easy to drive.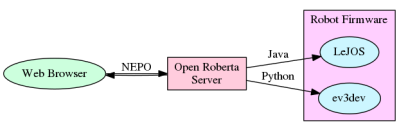 Open Roberta is the user-facing middleware in a chain of software and firmware bits that make a robot work in a classroom environment. For the students, everything runs inside a browser. OR provides a webserver, robot programming interface and language, and then converts the output of the students’ programs to something that can be used with the robots’ firmware. The robots that are used in classrooms are mostly based on the Lego Mindstorms EV3 platform because it’s easy to put something together in short order. (But if you don’t have an EV3, don’t despair and read on!)
Open Roberta is the user-facing middleware in a chain of software and firmware bits that make a robot work in a classroom environment. For the students, everything runs inside a browser. OR provides a webserver, robot programming interface and language, and then converts the output of the students’ programs to something that can be used with the robots’ firmware. The robots that are used in classrooms are mostly based on the Lego Mindstorms EV3 platform because it’s easy to put something together in short order. (But if you don’t have an EV3, don’t despair and read on!)









