Gamifying life is silly, fun, and a great way to interact with those strangers who you pass everyday. Here’s one example that might just pop up along your next walk to work. It’s a way to take a very unscientific straw poll on any topic — you won’t even have to use your hands to cast a ballot.
A group called [Vote With Your Feet] has come up with a novel way of casting ballots. Simply walk down the sidewalk and through one of two doorways, each labeled with either side of a dichotomy. Each doorway is able to count the number of people that pass through it, so any issue imaginable can be polled. They already did vim vs emacs (59 to 27), and we’d like to see Keynes vs Hayek, or even Ovaltine vs Nesquik. Users can send the machine new issues for the masses to vote on, so the entertainment is quite literally limited only by your imagination.
 The physical build is well documented. Since this is used outside, the choice of a flipdot display (of course always fun to play with) is perfect for this high-contrast in any level of light. Each doorway has a break-beam sensor which is monitored by the Raspberry Pi driving the overhead display (here’s code for it all if you want to dig in).
The physical build is well documented. Since this is used outside, the choice of a flipdot display (of course always fun to play with) is perfect for this high-contrast in any level of light. Each doorway has a break-beam sensor which is monitored by the Raspberry Pi driving the overhead display (here’s code for it all if you want to dig in).
The point of this art installation like this is to get people to interact with their environment in a novel way, which this project has accomplished exceptionally well. In 3 days, they registered over 10,000 votes which are viewable on their website. If you have a project in mind that calls for data visualization you might want to keep this in your back pocket.
We have also seen other ways that doorways can count people outside of voting, if you’re looking for any inspiration yourself.

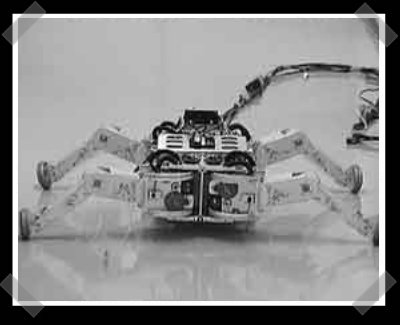
 [Ccates] jumped on the tiny robot bandwagon with
[Ccates] jumped on the tiny robot bandwagon with