Xbox 360 control for a toy heli

[Jason] leveraged the IR control libraries for Arduino to use an Xbox 360 controller to fly his Syma S107G helicopter.
Windows 7 running on Raspberry Pi
Why, oh god why? Well, the guys at Shackspace got their hands on a laser cutter that can only be driven with a Windows program. Their solution was to run Win7 on RPi as a virtual machine.
Twin-servos for your third hand
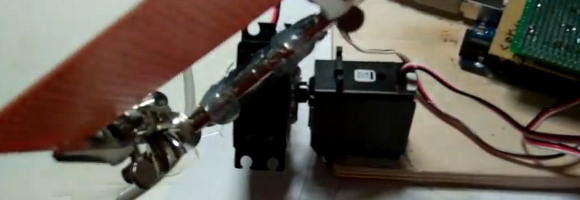
After growing tired of constantly flipping over the substrate being held with a third hand [Nidal] came up with a better way. He mounted his third hand on two servo motors so that it can be positioned with a joystick.
Depopulating SMD resistors
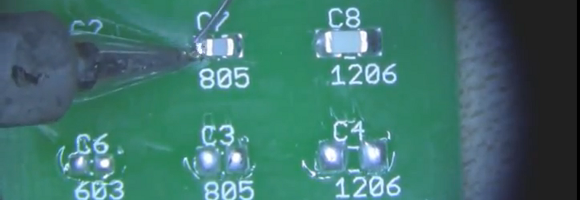
If you’ve ever tried to remove small surface mount resistors or capacitors with an iron you know it can be tricky. Take a look at the technique that [Scott] uses to remove the components.
Photographing the die of MSP430, Z80, PIC, and several other chips

Here’s the latest work from [Michail] on photographing the die of various chips. You may remember reading his previous post on decapping chips with boiling sulfuric acid.












