So your ally was slain. Your comrade has fallen. And somehow, that capital F coming from that tiny key is supposed to convey your respect? Please. What you need is a giant, dedicated F key that matches the size of your respect. And [Jaryd_Giesen] is gonna teach you how to build your own. Well, kind of. Between the Thingiverse build guide and the hilarious build video below, you’ll get the gist.
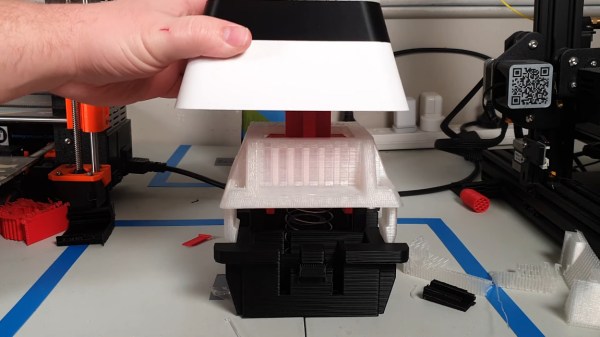
 One of the coolest things about this build is the custom spring. Between a birthday time crunch and lockdown, there was just no way to source a giant spring in two days, so [Jaryd] printed a cylinder with a hole in it to chuck into a drill and stand in for a lathe. Ten attempts later, and the perfect spring was in there somewhere.
One of the coolest things about this build is the custom spring. Between a birthday time crunch and lockdown, there was just no way to source a giant spring in two days, so [Jaryd] printed a cylinder with a hole in it to chuck into a drill and stand in for a lathe. Ten attempts later, and the perfect spring was in there somewhere.
We love the level of detail here — making a pudding-style keycap to match the main keyboard is the icing on this clacky cake. But the best part is hidden away inside: the stem of the giant switch actuates a regular-sized key switch because it’s funnier that way. Since it’s a giant Gateron red, it doesn’t exactly clack, but it doesn’t sound linear, either, mostly because you can hear the printed pieces rubbing together. Check out the build video after the break, and hit up the second video if you just want to hear the thing.
Seeing things embiggened is one of our favorite things around here. Some things are just for looks, but other times they’re useful tools.
Continue reading “Big ‘F’ Key To Pay Big Respects”
 [Windell and Lenore] from Evil Mad Scientist Laboratories brought a few hacks along. They picked up an old Radio Shack music player chip at the
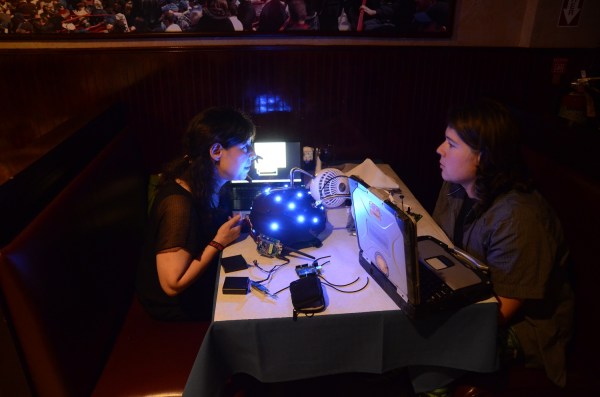
[Windell and Lenore] from Evil Mad Scientist Laboratories brought a few hacks along. They picked up an old Radio Shack music player chip at the  [Cal Howard] brought his DIY VR goggles. [Cal] converted a Kindle Fire into an Oculus Rift style head mounted display by adding a couple of magnifying lenses, some bamboo kebab sticks to hold the lenses in place. Judicious use of cardboard and duct tape completed the project. His current hurdle is getting past the Fire’s lack of an accelerometer. [Cal] planned to spend Sunday at Maker Faire
[Cal Howard] brought his DIY VR goggles. [Cal] converted a Kindle Fire into an Oculus Rift style head mounted display by adding a couple of magnifying lenses, some bamboo kebab sticks to hold the lenses in place. Judicious use of cardboard and duct tape completed the project. His current hurdle is getting past the Fire’s lack of an accelerometer. [Cal] planned to spend Sunday at Maker Faire










