If you need some sort of distance sensor for your robot, drone, or other project, you have two options: a cheap ultrasonic sensor with limited range, or an expensive laser-based system that’s top of the line. LIDAR-Lite fills that gap by stuffing an entire LIDAR module onto a small board.
In traditional LIDAR systems, a laser is used to measure the time of flight for a light beam between the sensor and an object. The very accurate clock and laser module required for this system means LIDAR modules cost at least a few hundred dollars. LIDAR-Lite gets around these problems by blinking a LED with a ‘signature’ and looking for that signature’s return. This tech is packaged inside a SoC that reduces both the cost and size of a traditional laser-based LIDAR system.
As for the LIDAR-Lite specs, it can sense objects out to 40 meters with 5% 95% accuracy, communicates to any microcontroller over an I2C bus, and is small enough to fit inside any project.
Considering the existing solutions for distance measurement for robots and quadcopters, this sensor will certainly make for some very awesome projects.
Edit: One of the guys behind this posted a link to their spec sheet and a patent in the comments














5% accuracy ? (it gets it wrong 95% of the time) or 95% accuracy (it gets it right 95% of the time) or an accuract of +/- 5% … obviously the last one, it just crashd my mental gears when I read it.
Appropriate name, but I think we’d all appreciate it if you renamed yourself to “Mr. Doesn’t Post On Hack-A-Day”.
Thats the joy of the web, you can be anbody you like.
Nice identical IP addresses there….
it looks like that was intentional, whoosh.
Sound to me like were having a troll off in heeeehre
i thought exactly the same as Mr Pedantic at first
normally in engineering/physics an accuracy of +/- 5% would tell you that the result would be “within*” 5% of full scale/the current reading
*2 sigma i.e. a 98% probability
so you were more correct first time
Could this be used as an altitude sensor? It’d be cool to point it at the ground and use it to tell how high my quad is. Might make a cool system where you just hit one button and the thing descends on its own and slows down properly.
You do realize there’s a video of it used on a quadrocopter ?? Just check their website
I wasn’t able to access the site. I wasn’t sure how they were using it. Was it indeed according to the idea I had?
Just make sure to poll all the time, because 5% is 2metres difference at 40m :D
The 5% accuracy number comes from Lattice who supplies the FPGA we use as our Signal Processing Core. The the internal clock on that part is our time reference. They advertise a 5% accuracy, but random testing of the chips shows that it tends to be much better than that – we’re finding better than 1% accuracy. But I’m sure there can be outliers and that’s why I stuck with the 5% number to be safe. The reason we use the internal clock vs. an external oscillator for reference is that we’ve found that external oscillators can emit RFI at frequencies that interfere with GPS. On a UAV, that’s definitely a problem. However, if you want more accuracy, we have provided a means on this design to connect an external reference and improve accuracy to 1cm at all ranges. Our goal was to build a device that people could experiment with and that would expose people to our technology.
They should sell it to GM as 5% accuracy is more accurate than their collision avoidance system at -4% accuracy.
-4% accuracy? It’s accurate -4% of the time? Hoe does it manage that? Is it wrong 100% of the time and makes other nearby equipment 4% less accurate too?
probably
I don’t see what is the great innovation in this project. They claim it’s the pulsing, but isn’t that like a standard in the distance measurement sensors? At least I’m pretty sure all the ultrasound sensors use pulsed signals to reduce noise.
Show me an ultrasonic distance sensor that can do 40m. The innovation is the fact that it’s relatively accurate LIDAR for cheap.
Nope – standard light-distance measurement sensors (such as the GP2Dxx series) use a position sensitive linear array. They can be affected by a host of things and are WAY off for 40m at ANY accuracy. Ultrasound DOES pulse, but it can be absorbed more easily – to measure 40 meters with it alone would be quite problematic. Also, keeping a “beam” of sound coherent is difficult. Both of those things CAN be done, but with a lot of tradeoffs and price increase.
This seems really cheap for 40m distance ranging.
Not ultrasonic, but Hilti PD5 Laser Range Finder does 70m with 1.5mm accuracy for just 150$.
Sure it’s 50$ more, but it is a complete robust device with lcd, battery …
I am sure the electronic circuit inside alone cost less than this project, and with much better performances
Can’t find the hilite for < 180 USD. This is $80.
Hilite is way way more accurate and both only do single measurement of distance. This one is 1.5 degree 'beam' so nowhere near as reliable. At 40m 1.5 degree spread is much larger than laser point. At $40 it would be more acceptable IMHO.
One thing about those is that they’re ranging rather slowly, averaging data across 1 second usually. They’re not meant to be used on the move, so they can average out the phase differences they’re trying to measure. I have a schematic from a 1979 TI optoelectronics book that did a phase measurement from an IR LED pulse, and it used some rather unique components, like two crystals exactly 80Hz different in frequency. Today, commercial laser tape measures may not do that exactly, but I wouldn’t doubt they may be using two slightly out of tune ring oscillators and letting them go until they synchronize and using the pulse count to determine the distance.
OO I have to check the shelf, I might have that…
rue_mohr: in fact, you don’t have to! Just found it online on archive.org. https://archive.org/details/OptoelectronicsTheoryPractice Starts on page 411 of the slider.
What about those IR range sensors? They’re no good for a range of 40m but for close proximity robots they’re a cheap solution. I think the most robust of the available IR range sensors has a range of 216 inches (18 ft)
Is this actually LIDAR, or is it phase shift interferometry? Phase shift doesn’t require the same kind of clocking as LIDAR, and all the components are much cheaper.
They are doing some sort of pulsed sampled auto-correlation. It is possible they are doing chirped pulses which would be a good way to get phase information out of it.
There is a very good academic review of all the rangefinder techniques (I have it printed somewhere but not with me right now). I have been considering how to build a sub-micron optical position detector without using an interferometer. Done a ton of simulations as well. Personally I don’t think I would fund this project, my reason is simple:
“All optical ranging sensors use the principle of “Time-of-Flight” (ToF) to calculate distance to a target.” This is simply not true at all. Even the most basic research will tell you most optical range finders are geometric (think of the ones used for golf). Do they simply not know this or are they just misleading people? Neither is good.
Okay, I stand corrected… It certainly wasn’t my intention to mislead. Yes, I’m aware that there are a lot of different range-finding technologies out there. I guess I could have more accurately stated that MANY optical ranging sensors use ToF… I hope you get a chance to look at the links I’ve posted below so you can gain a better understanding of our technology.
I will try to look at more of it later. Glad you are interested in correcting things. Sorry if you felt I was being to hard on you…
No Worries! People have been harder on me…my mother comes to mind.
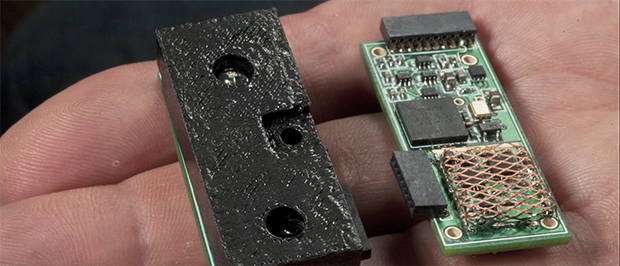
i cant say i have seen/used RF cans quite like that on modern electronics before!
That jumped out at me, too! I love the idea. You attenuate the frequencies of interest, but the thermal mass of the shield is still low and thus it’s easier to solder. Also, inspection and probing and cooling are easier.
Perhaps not as robust as an RF can made from simple rolled sheet metal, but the mesh construction will use considerably less material.
Well, Bob our engineer is sort of a resourceful guy and uses what’s at hand. The module you’re referring to was a prototype. The shields on our production modules is a bit more robust…
Can’t find out how long it takes to get a measurement. Hints that 100ms is fastest possible time. Has 1.5 degree ‘ beam’ so not useful to scan an area efficiently.
Appears to be a single shot distance meter.
Hello. I wanted to thank everyone for their interest in our sensor. We’re 2 (well almost three) days into our crowdfunding campaign at Dragon Innovation and the response has been fantastic. I have been responding to questions on Reddit and also on the DIY Drones blog and I’ll start getting some responses in here as well. For those of you that are interested a preliminary spec sheet is available at this link https://docs.google.com/file/d/0BwbDM4W-3iVPU2JmOEpvTFdEZnM/edit?pli=1 and for the insomniacs among you our signal processing patent information is available here https://www.google.com/patents/US8125620?dq=patent:8125620&hl=en&sa=X&ei=QqnhUpTUMYvioASK14GYCQ&ved=0CDUQ6AEwAA
Hi Dennis, I’m a student looking for a cheap way to measure distance underwater for a university project. Would it be possible to switch out the transmitter and receiver devices on the lidar lite for ones that operate at a different wavelength, to increase range underwater?
One more thing…. We also have a patent application pending that better describes how our signal processing technology is implemented. You can find it here https://drive.google.com/file/d/0BwbDM4W-3iVPRVJhQ0Q5NGlqdVk/edit?usp=sharing
And this suddenly got much less interesting! Wow, yay, thanks for linking up to how it works! This is totally useful and something we can make use of legally!
Nah, it makes it more interesting. You know how it roughly works. Duplicating it is still difficult, and I can appreciate how much effort goes into this (and would be required to duplicate it). Moreso, I now can more easily contemplate situations where this would NOT be useful, so it helps in the selection. I doubt I could duplicate it for this cost, and in any reasonable time.
And that’s why we are offering this module… We’ve taken everything we’ve learned in integrating the technology into other products and condensed it to a minimum viable product. the TX and RX circuit designs have been optimized for our signal processing technology and we’ve made provision on the board for an external reference clock for more accuracy as well as access to the receiver bias circuit so that external power and temperature regulation can be supplied to an Avalanche Photo-Diode detector for greater sensitivity (range). Oh, and you can throw a low power laser on it too…which we need to discourage due to eye-safety issues. Our goal is to expose people to the technology and for this to be a building block for projects and to get people thinking about applications.
Can this be hacked into an automatic cruise control adjuster for vehicles? I want to add such a device to my 1997 Ford Taurus.
I imagine you’ll want quite a few more sensors to prevent collisions if automating cruise control.
All it needs to do is adjust the throttle up and down to keep a set distance behind people who won’t hold a steady speed.
Sounds like a great Arduino project to me…. Since our signal processing is looking for a signal match between the encoded transmit signal and the received signal, multiple sensors could be looking in the same general direction without interfering with each other. And all of the sensors would act as slaves on the I2C bus.
We at AFFA Labs have got a pretty cheap LIDAR that we’re offering, just getting it off the ground. Specs and photos available here: http://www.affalabs.com/collections/lidar/products/protox2d
We’ve enjoyed playing with them…
Hi Josh, I’ve seen your product and it looks pretty interesting. My business partner and the brains behind LIDAR-Lite technology worked on a similar device for Honey-Bee Robotics a few years back as part of a NASA project. Yours costs way less! I’m sure he’d enjoy talking about it with you sometime. Maybe we could even look at how our technology might enhance what your doing. Could be a great collaboration.
What is the minimal distance and error. I need it to measure water level from about 20cm to accuracy of 0.01mm ?
Since we transmit and receive at the same time our minimum measurement distance is zero. However, the accuracy might be a bit of a problem without an external reference clock and even with a reference oscillator our best accuracy has been 1cm. I’m sure we could improve that, but you might want to consider one of the industrial liquid level sensors that are design for very short range and extremely high accuracy.
This is with IR diodes? How well does it work outdoors on a sunny day with lots of background?
Pretty well actually. Our outdoor tests show minimal degradation of sensitivity. This is because of the sensitivity gains from our signal processing technology which allows us to dig into the “noise” and see a return signal.
One test we accidentally performed that was really interesting was firing the sensor at a target that had a very inexpensive fluorescent shop light hanging from it. These lights can throw out a lot of IR radiation and confuse IR based sensors. In this case we were ranging to about 10m and turned on the light as it was facing directly at the sensor. The result? No change in distance readings.
There are actually not very many technologies that rely on real “time of flight”. Most laser scanners use correlation / phase-shift techniques of some kind, as do the PMD, SwissRanger and Canesta 3D cameras. This is precisely for the cited reason that you need a DAMN fast timer to get any decent resolution out of measuring the flight time of light packets.
So when they claim that phase correlation is their innovation, that is flat out wrong.
Personally I think it’s great to have more options in distance sensing, especially long-distance. For short distances, this would offer little over the current selection of Sharp IR sensors (~0.05s per measurement, max distance 5.5m) or ultrasound sensors.
We agree that it is great that there are more and more options coming to the market to solve the problem of machine vision for autonomous devices. I think that we are just beginning to scratch the surface on what we can do with our technology. I’m not sure if you’ve reviewed the document I referenced earlier on our signal processing, but if you haven’t I would encourage you to so that you can get a complete understanding of what we are really doing. I would also point you to another document, https://drive.google.com/file/d/0BwbDM4W-3iVPRVJhQ0Q5NGlqdVk/edit?usp=sharing , which better describes the implementation of our technology in a ranging device.
Our technology functions far better than the ultrasonic or inexpensive IR sensors that you describe. The least expensive 40m product I’ve seen was a laser based system selling for $250. I’m sure that there are other sensor technologies out there with similar performance capabilities, but we feel we have a viable alternative whose capabilities we are only beginning to explore.
I’d love to try one of these but having to pay almost double because I’m not an early adopter really bugs me. it always sorta feels like it goes against the spirit of crowd funding…
My apologies. I know how you feel, I’m the guy who always winds up paying retail and then some for the cool stuff I see. You should see what happens when I go to buy a car – not pretty and usually the source of amusement for my friends.
We really wanted to offer the sensors at $45 or less to everyone, but the reality of producing in low volume, particularly the optics, drove our costs up pretty high. At $45 we loose a lot on each unit sold. That was our loss leader… The Double Vision option is currently the best deal, if you have a friend that wants to go in with you.
In our opto-electronics world, volume is the knob we have to turn to in order to reduce cost and we know that eventually we can bring costs down, but just not in the volumes we’re producing for this campaign.
Thought you might like to know that we just added an incentive that, if you can get 9 of your friends to buy into, gets you sensor modules at $60 each. It’s not the $45 price, but it’s not bad… I also realize that it’s a lot of $$’s, but wanted to throw it out there as an option.
Looks like a lock-in-loop amplifier set up (which is like AC-bridge excitation / a heterodyne receiver) except that it’s digital with a psudorandom sequence (like how GPS implements code-division multiplexing on the 1.5 GHz channel by generating some sequences with specifically hooked up shift registers).
Very clever – should work quite well – noise rejection will be very good, as the signal chain being correlated against will be quite long. One could even use multiple different sequences just as GPS does, and have one receiver and mulitple light emitters, and get multiple distance measurements at the same time, analogous to how GPS receives from multiple satellites on the same channel with just one radio front end – by having multiple PLL’s looking to lock on to each of the different expected sequences. (which is also why GPS is cheaper than the competition to implement – only need one radio front end, rather than having to deal with receiving multiple different frequency channels at the same time, as GLONASS does…)
If the step response of the sensor output can be kept well-behaved, this same circuit would be equally good for taking very high precision and fast short-distance acoustic measurements as well, say by using a couple of piezoactuators. This could have applications for implementing some very fast closed-loop positioning control.
Good luck guys!
Thank You! You are right on with your observations. And your idea of using it a a fast closed loop positioning control is intriguing.
I’m going to make a comment about noise rejection, but keep in mind I’m the non-technical guy of the PL team. Our signal to noise ratio is generally around 0.2:1 where most conventional system operate at 4:1. So we are basically able to dig down into the “noise” and find a signal, which explains why we can get the performance we do out of very inexpensive opt-electronic components. It also means you can get even better performance out of more costly components – within the laws of physics… I’ll stop there as I think I may have gotten pretty far out on that limb..
Thanks again!
“So we are basically able to dig down into the “noise” and find a signal,”
Soooo… We get signal?
We refer to the light we see returning from the target as a “signal”. And “noise” is the ambient light or solar radiation in the environment we are operating in. Sorry if that was confusing…
*sigh* people are already forgetting… http://www.youtube.com/watch?v=vfwqvUPIRkg
Oh jeez…. Hah!
Have you tried comparing this device to existing devices over surfaces of varied reflectivity? I am particularly intrigued to see if it responds better in semi-reflective (i.e. partially transmissive) surfaces such as glass, water, ice, plastics, etc.
We really haven’t had the opportunity to do that comparison. We have anecdotally been told by one of our customers that they had good success in measuring the height of H2O in a tank which can be a challenge. And we have been able to range targets through glass (unless, of course, it has an IR coating to make it “Low E”). A cool feature of our system is that we store the full signal record allowing you to download it and look at all the correlation peaks that might be present. Analyzing at the record would allow you to infer, for example, the surface of the water vs. the bottom. We also can provide a signal strength reading along with the distance so that you can determine the reflectivity of the target based on the distance that is being displayed.
I read an article in the mid 1990s in the New Scientist, about an ingenious method that was gonna put radar into absolutely everything for almost free.
Rather than sampling the signal serially, it sampled it all at once. The return signal ran along a PCB trace past a line of capacitors next to each other. If you ground the caps all at once, then whatever voltage was passing by it’s other terminal at the time ends up stored in it. Since, as the signal contains such short pulses, places along the PCB track length will be at different voltages as the pulse goes along it.
So once the caps are all connected to gnd at once, then disconnected, so you’ve got a row of caps with a time sample stored across them.
For the system, you transmit a constant pseudo-random code sequence. By checking what arrives back in the caps, and checking how far along the sequence is, you have time and therefore distance!
I think that’s the gist of it. Sound interesting or useful? It’s not something my cellphone can do, so presumably it never went anywhere. Shame cos it was interesting.
That’s pretty cool. I hadn’t heard about that, but then I’m not the technical guy in the group…. It does sort of capture the essence of what we’re doing. We do utilize aspects of radar combined with ToF in a what’s essentially a hybrid technology. Kind of LIght raDAR…
CHEAP LIDAR: We were looking for a inexpensive LIDAR (laser ranging) solution for a robotics project we were working on. We could not find one so, using the lidar unit for the XV-11, we developed one: PROTOX2D LIDAR (http://www.affalabs.com/products/protox2d). Its simple to use – via the provided usb cable, simply read Serial output (115200bps, 8N1) the angle and distance values. Angles 0-360 degrees, and distance value are in millimeters(mm). Can be used with many sbc such as raspberry pi, pcduino, pc, mac, etc….any device that can read serial output via usb.
data output: Unit ID, Y Degree (always 0 for ProtoX2D), X Degree, Distance in mm, Quality of Signal, RPM of Laser Assembly, CRNL
EXAMPLE USE from a Linux terminal:
>> screen /dev/ttyUSB0 115200
sample output:
[‘A1’, ‘0’, ‘276’, ‘239’, ‘1094’, ‘203’]
[‘A1’, ‘0’, ‘277’, ‘239’, ‘1100’, ‘203’]
[‘A1’, ‘0’, ‘278’, ‘240’, ‘1123’, ‘203’]
[‘A1’, ‘0’, ‘279’, ‘240’, ‘1118’, ‘203’]
[‘A1’, ‘0’, ‘308’, ‘302’, ‘734’, ‘203’]
[‘A1’, ‘0’, ‘309’, ‘298’, ‘881’, ‘203’]
“3D Model and Laser scan – Bosnian Valley Of The Pyramids”
https://www.kickstarter.com/projects/1461001152/3d-model-and-laser-scan-bosnian-valley-of-the-pyra
https://www.facebook.com/SemirOsmanagich
LIDAR scanning gives detailed results like this:
https://www.facebook.com/photo.php?fbid=541766202545353&set=a.540978819290758.1073741855.100001359335487&type=3&theater
Bosnian pyramids complex 2013
https://www.facebook.com/photo.php?fbid=535812419807398&set=a.306040872784555.86194.100001359335487&type=1&theater¬if_t=like
“Archaeology is a very conservative science. If you are not a professional or an archaeology professor, you cannot dig on major sites. You cannot just go to Egypt and start digging, or China or Mexico. Actually, archaeology is an elite science with selected information. But we said, “There is no elite science in Bosnia. The knowledge belongs to all of us. It is the cultural heritage of the world.”
– Semir Osmanagich
Bosnian pyramids discoverer Sam Osmanagich gives a talk in the Czech Republic on pyramids around the world.
“Tajemství pyramid – Brno” (February 15, 2014)
http://www.faktax.tv/index.php?page=vfile&file_id=149
“The best article I’ve read on the Bosnian pyramids.” – Klaus Dona . . .
http://anamericaninbosnia.blogspot.com/2013/03/the-mysterious-anti-scientific-agenda_455.html
Could use this unit on a project we are doing —
Is it still available?
Price of the PC alone — 0-5m ? —– Price with the lens 0-20m ?
Actually -it would be nice with PC alone @ 0-6m
Yes, it’s definitely available! We’re in production and hope to begin shipments late August, early September. I’d like to know more about your application and requirements. Contact me directly at sensors@pulsedlight3d.com and we can talk about your project!
Enough chatter already –waiting to purchase one. Money talks and B.S. walks –
I think this is a great product. I was working on this same thing about four months ago, but came to a short end with lack of funding available and lack of time. The only thing that I saw being the huge limiting factor with this on my own regular dis the accuracy of my components used for the filter and the on/off time of the pulse time that correlated to distance. My idea was to try to use visible light lasers for the pulsing but I’m not sure how accurate it would necessarily be with ambient light.
Sorry to hear about challenges getting funding for your project. I’ve been a big advocate of creating a micro-lending source tied to mentoring for startups to help them get out of the conceptual stage. We’d see a lot more innovation if people were able to get help getting started without the significant loss of equity that is usually associated with Angel or VC investment. There’s a time and place for that sort of investment, but not when someone is just trying to prove a concept.
I think you might of had some challenges using visible light sources, particularly in bright sunlight, but it sounds like an interesting project. Don’t give up on your vision. Hardware is hard, but with all the innovations in manufacturing it’s getting easier.
Well Dennis –its August 21st –still waiting to buy it for a project —
We’re waiting too…and we appreciate everyone’s patience. We receive the assembled boards this week, the lenses arrive next week and housings from Asia will follow… Once we have all the parts we begin final assembly, test and shipping.
Tkx Dennis
Well Dennis –its Sept 2nd –how is “supply side” economics working for ya : > )
The supply chain works in mysterious ways… No housings and no firm delivery date. Rather than continuing to wait, we’re moving forward with more expensive local production so that we have more control over production and can start shipping soon.
Dennis
What i really need is your Flight of Time solution and the basic PC card –no cases –no lenses –I most probably WONT use your PC mounted LED emitter/receiver either
Sooo you can ship the raw working PC card shown in photo for me to test our device
oh –its NOT a drone –By the way –what is estimated accuracy from say 5cm to 6m ?
Hey Jerry, let’s talk about your requirements more off-line. Email me at sensors@pulsedlight3d.com and we can discuss your needs in more detail!
Well –its the 28th –whatsup
If I had a nickel… We have boards, lenses and cables. Ready to go, but no housings. Supposed to hear from our supplier today on the status of the order, it’s been almost 8 weeks. The alternate plan if there are more delays, is to machine housings until the injection molded parts arrive. Expensive, but I don’t want to delay any further…
I’m excited to hear that they are just about rolling out!
Us too… Waiting for other people to get stuff done kills me though…it can’t happen fast enough!
Machine ONE housing then make an RTV silicone mold for casting housings in fast setting urethane resin.
I will say that I stopped by their office and saw a functioning device a while back. So what Dennis is saying about supply chain issues is likely just that: supply chain issues. The tech appears well developed.
Thanks for that update. I too am planning a visit in the near future, and will share whatever I can about what I learn.
Dennis
Any update
Yes! Our offshore supplier turned out to be unreliable so we did a pivot on the housings and have a limited number being machined so that we can begin early shipments while we get a supply of injection molded parts from a quick turn provider. A part of this process was a redesign of the housing for machinability. Which has turned out to be a good thing as the new design is easier to assemble and we think will take a lot more abuse than the previous one. We like it so much we’ve carried that design over to the new injection molded part.
Unless you’re getting an insane deal on machining I think you’d have less per unit cost to have a set of master parts machined then make a multi cavity RTV gang mold then cast the housings yourself in a quick setting urethane like Smooth-On Onyx. The resin will set faster than the housings can be machined. Making the mold would only take a couple of days, one for each half to cure. There are faster setting silicones but better results and little or zero shrinkage tend to come from a slower setting platinum cure RTV like Silicones Inc. P60.
That’s a great suggestion. The machining is a friend of a friend sort of arrangement….but still slightly expensive. The per unit time is under 5 minutes, so it’s not too bad. We had explored a cast process, but our optical tolerances still required some post machining to make it work. Maybe we were using the wrong materials, but in the end we felt it would be the most expedient to machine a limited number to satisfy our immediate needs while we set up a new injection molded parts supplier.
Hi Dennis, in case you still check this thread, any word on a LED-based iteration now that Garmin has taken over?
I’m looking for distance sensor but don’t need 40 meters. A maximum of 4m is enough for my project. You already described that the sensor does a good job outside with bright sunshine. I wonder whether it’s also the case when measuring the distance to a surface of SNOW?. Because the reflectance of IR sunlight must be extremely high. Is a distance measurement to the snow-surface as accurate as to white paper?
Has anyone else noticed V2 has been released?
It’s not quite as cheap as V1, but 400kHz I2C and faster sampling rate has me pretty excited!
Is the copper mesh thing like a Faraday cage?
I built a DIY 360 degree LIDAR with the Lidar Lite v2 (http://grauonline.de/wordpress/?page_id=1233). For realtime outdoor SLAM :-)
Blah blah blah. Can’t buy them anywhere. Storm in a tea cup. They’ve gone out of business.
I think it’ll actually be *easier* to get them soon, as they’ve been acquired by Garmin and apparently a Garmin-branded v3 is soon to follow.
Confirmed. Garmin now sells version 3. They upped the price another fifty percent, but it’s something!