 [madcowswe] starts by pointing out that the entire premise of ODrive (an open-source brushless motor driver board) is to make use of inexpensive brushless motors in industrial-type applications. This usually means using hobby electric aircraft motors, but robotic applications sometimes need more torque than those motors can provide. Adding a gearbox is one option, but there is another: so-called “hoverboard” motors are common and offer a frankly outstanding torque-to-price ratio.
[madcowswe] starts by pointing out that the entire premise of ODrive (an open-source brushless motor driver board) is to make use of inexpensive brushless motors in industrial-type applications. This usually means using hobby electric aircraft motors, but robotic applications sometimes need more torque than those motors can provide. Adding a gearbox is one option, but there is another: so-called “hoverboard” motors are common and offer a frankly outstanding torque-to-price ratio.
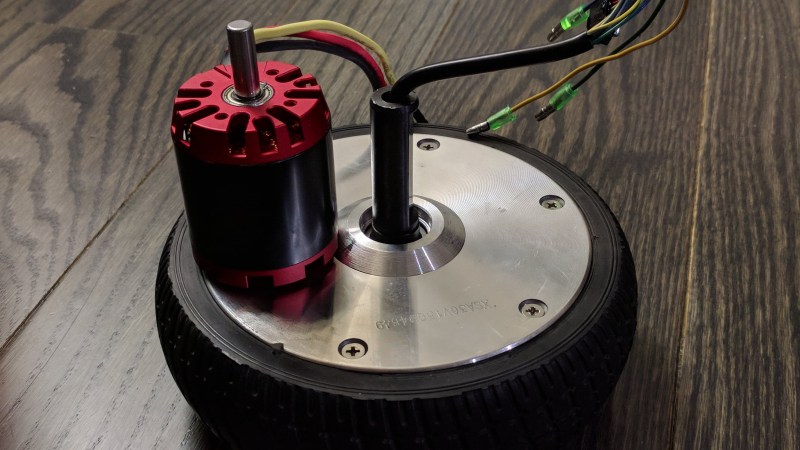
A teardown showed that the necessary mechanical and electrical interfacing look to be worth a try, so prototyping has begun. These motors are really designed for spinning a tire on the ground instead of driving other loads, but [madcowswe] believes that by adding an encoder and the right fixtures, these motors could form the basis of an excellent robot arm. The ODrive project was a contender for the 2016 Hackaday Prize and we can’t wait to see where this ends up.













They are better described as motorwheels because they have appeared on many motorized devices.
I think it is a good motor on an electric scooter.
Do we really need to keep calling them “hoverboards”?
It’s the name of the specific product, and it gives context to the parts in question. It’s a foolish name, but most of us know that “hoverboard” is a reference to the two-wheel self-balancing scooter, not something that actually hovers.
But it’s not the name of any specific product, it’s a buzzword used by media that doesn’t know any better. Just like calling a quadcopter a drone.
So why not just call them scooter motors if we all know what they are referring to
Oh man you definitely hit upon one of my pet peeves. I cannot stand it when they call quadcopters ‘drones’. I get it though, most folks don’t care and get the general idea. Just like the eye of the hurricane being dangerous. No, the eye is actually quite nice and a great time to refill your drink before the eye wall of the hurricane comes thru and does its destructive thing again. Oh well.
What kind of scooter do you mean?
There are Segways, mobility scooters, kids’ scooters, electric inline scooters, etc.
“Hoverboard” is much more specific. Just because it’s annoying and inaccurate doesn’t mean it isn’t a useful term when referring to a specific device.
Do you refuse to use the term “hot rod” when describing a powerful custom vehicle? It certainly isn’t a metal bar at high temperature, and almost everyone knows what is meant by it. English is full of such terms, and new ones are being added to the language all the time.
Segway is a brand name, not a vehicle type. Just as Rollerblade is to inline skates.
They use the similar motors in eBikes… so by your logic, accuracy in not that important. So lets call them “Hoverbikes” or my Fischer and Paykel washing machine “Hoverwasher” or my Quad Copter “Hoverdrone”.. Hang on, that actually does hover.. but anywho..
It’s a brushless motor and should be referred to as a brushless motor. Which just happens to be used in many different domestic, mobility and leisure applications including and not exclusive to the self balancing toy a.k.a. the generic and misleading “Hoverboard”
Also shouldn’t confuse English language with the mind numbing drivel offered up to the ignorant masses by today’s media outlets, God I hate the media.. and your Hot Rod example is terrible.. I mean I wouldn’t pull the spark plug out of my lawn mower and declare that its part of a Hot rod would I? Its a spark plug… Young people today… I just don’t know.. ;)
My scooter has a 250cc 4-stroke :-)
Mine too. Honda PS-250 by chance?
So did my old Honda Helix.
Because it’s not a scooter.
Someone’s going to be very rich if they do create one that hovers without need for a special surface.
The Mythbusters built one out of leaf blowers and plywood. Nowadays, it should be possible to use a BLDC driven supercharger for much less noise.
Leaf-blower and plywood is good fun — did that back in the day.
Doing the same with an electric motor would be the awesomest thing in the world. (tips@hackaday.com)
Oh but they do actually hover! Once they catch on fire and the lithium batteries explode, they launch right up into the air and hover for a bit.
“hoverboard” == Twat scooter
XD
Looks like a good start for homebrewed E-bikes, too. A quick Google shows that there are a few like-minded people out there working to use the motors with E-bike throttles etc. but no shining example of a final build (yet).
Are they using them as a friction drive?
Robots are cool and all, but the real best use of these is a micro sized go-kart that folds to the size of a suitcase and goes unsafe speeds.
Has anyone use them for a battle bot yet?
There is clearly a lot of effort going into this project, but I’m not sure they are on the right path.
Lot’s of detail (I like that), but not much thought seems to be hiven (yet) to the more overall design.
Using electric wheels for a robot arm seems a bad desision.
For a robot arm you need low speed and huge amounts of torque (and a stiff frame).
To reach that you need to gear your motor down a lot.
A much better choise for motors seems to be one of the many motors designed for electric bicycles & motorcycles.
It starts with the fact that you can use different motor sizes (power, torque, weight) for different axis of your robot.
The size / weight / placement of the motors is crucial when designing a good robot.
A too big motor on the 4th, 5th, or 6th axis reduces performance significantly by reducing payload and making the whole thing top heavy.
On top of that the motors for bicycles / motorbikes come with built in gear, which is a first step, but they need to be geared down further.
A good gearbox is unfortunately pretty expensive and lots of hobbyists seem to forget that. A low -backlash gearbox generally costs more than the motor it is connected to. But by using only gears for the first reduction step the backlash is not so important. If you add a 2nd and 3rd reduction step with (almost backlash free) timing belts then the backlash of the first gear is also reduced by the ratio of the 2nd and 3rd reduction step.
This is also the reason that 1, 2 and 3 step planetary reducers nearly have the same backlash.
Is this a kind of motorized source? It is much more than a hoverboard I think.
We’re using these motors right now for a robot project. They’re incredibly torquey and the integrated hall sensors make them stupid simple to commutate even just using digital_read & write. Sinusoidal control gets rid of all the cogging as long as you have a better angular position sensors.
If your child is seriously injured in a hoverboard accident, is anyone liable? The answer depends
Hi, have a broken board here.
I think the problem *might* be controller related as the MOSFET has become an OSFET with the resulting smoke and burnination.
Motors may be fine though.
Anyone have a use for some monster tape drive motors, they are similar but are centre shaft not external like these.
Direction *and* speed control doable but a lot of effort which is why they haven’t been used much.
location: classified but might be able to triangulate with the radio code ending Q and frequency around 28.521 MHz
In my opinion, It ‘s a good motor on hoverboard and electric scooter.