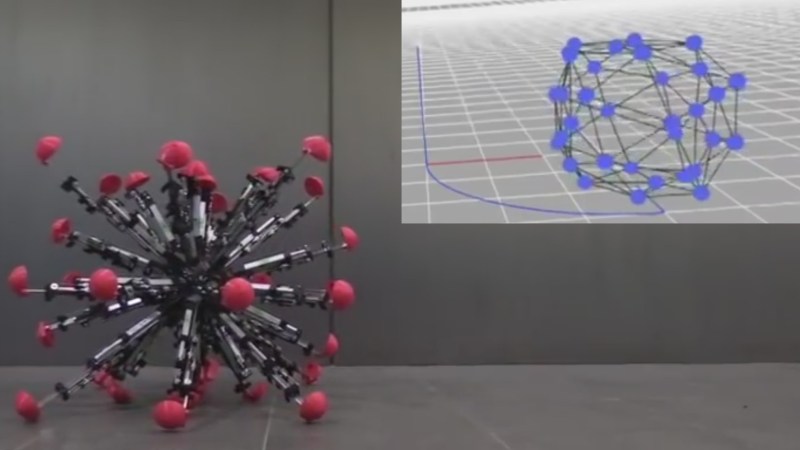
We have heard bipedal walking referred to as a series of controlled falls, or one continuous fall where we repeatedly catch ourselves, and it is a long way to fall at 9.8m/s2. Some of us are more graceful than others, but most grade-schoolers have gained superior proficiency in comparison to our most advanced bipedal robots. Legs involve all kinds of tricky joints which bend and twist and don’t get us started on knees. Folks at the Keio University and the University of Tokyo steered toward a robot which does not ride on wheels, treads, walk or tumble. The Mochibot uses thirty-two telescopic legs to move, and each leg only moves in or out from the center.
Multi-leg locomotion like this has been done in a process called tensegrity, but in that form, the legs extend only far enough to make the robot tumble in the desired direction. Mochibot doesn’t wait for that controlled fall, it keeps as many downward-facing legs on the ground as possible and retracts them in front, as the rear legs push it forward. In this way, the robot is never falling, and the motion is controlled, but the processing power is higher since the legs are being meticulously controlled. Expecting motion control on so many legs also means that turns can be more precise and any direction can become the front. This also keeps the nucleus at the same level from the ground. We can’t help but think it would look pretty cool stuffed into a giant balloon.
Some people already know of tensegrity robots from NASA, but they may not know about the toolkit NASA published for it. Okay, seriously, how did knees pass the test of evolution? I guess they work for this jumping robot.














Some vehicles in Snow Crash had wheels like this, Hiro’s motorcycle and some skateboards IIRC. In that novel the telescoping rods also worked as active suspension to smooth the ride.
Oh my, that’s right. I should have thought of that. Nice reference.
First thing I thought of too!
Darn! i thought “leg day” refered to that glorious day in early spring when all the girls start wearing skirts again.
Don’t let them tell you how to celebrate leg day.
If there are no toe sensors, I don’t see this working on any but the flattest surfaces. STAIRS! I want to see it climb stairs!
Feedback from the motors could tell when the feet have encountered an obstacle. I agree about stairs but it may need to be larger for that.
Hell, feedback from the actuators (a pressure sensor in the base of a pneumatic cylinder for instance, or current consumption of a motor or solenoid) could tell you want portion of the robot’s weight each leg was supporting and knowing that leg’s normal to the sphere (same as it’s position on the sphere since they only go in and out) and input from an IMU on board would tell you a significant amount about the shape of the terrain over which it was making its undulating roll.
> Okay, seriously, how did knees pass the test of evolution?
You think we have it bad with knees, just wait until you begin looking at the anatomy of horse legs.