Nature is known for its intense beauty from its patterns and bright colors; however, this requires going outside. Who has time for that insanity!?!? [Bleuje] provides the perfect solution with his mesmerizing display of particle behavior.

Nature is known for its intense beauty from its patterns and bright colors; however, this requires going outside. Who has time for that insanity!?!? [Bleuje] provides the perfect solution with his mesmerizing display of particle behavior.

When we look at how everyone’s favorite flying dinosaurs get around, we can see that although they use their wings a lot too, their legs are at least as important. Even waddling or hopping about somewhat ungainly on legs is more energy efficient than short flights, and taking off from the ground is helped by jumping into the air with a powerful leap from one’s legs. Based on this reasoning, a team of researchers set out to give flying drones their own bird-inspired legs, with their findings published in Nature (preprint on ArXiv).
The prototype RAVEN (Robotic Avian-inspired Vehicle for multiple ENvironments) drone is capable of hopping, walking, jumping onto an obstacle and jumping for take-off. This allows the drone to get into the optimal position for take-off and store energy in its legs to give it a boost when it takes to the skies. As it turned out, having passive & flexible toes here was essential for stability when waddling around, while jumping tests showed that the RAVEN’s legs provided well over 90% of the required take-off speed.
During take-off experiments the drone was able to jump to an altitude of about 0.4 meters, which allows it to clear ground-based obstacles and makes any kind of ‘runway’ unnecessary. Much like with our avian dinosaur friends the laws of physics dictate that there are strong scaling limits, which is why a raven can use this technique, but a swan or similar still requires a bit of runway instead of jumping elegantly into the air for near-vertical take-off. For smaller flying drones this approach would however absolutely seem to have legs.
Continue reading “Flying Drones That Can Walk And Jump Into The Air: An Idea With Legs?”
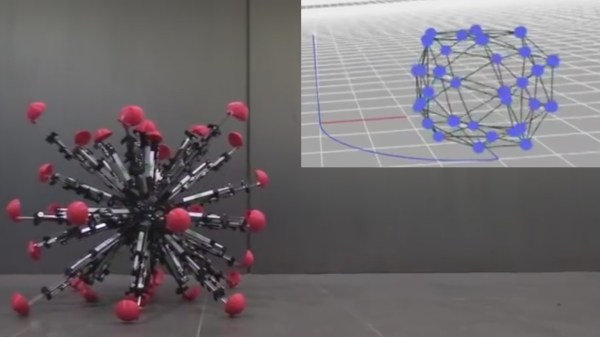
We have heard bipedal walking referred to as a series of controlled falls, or one continuous fall where we repeatedly catch ourselves, and it is a long way to fall at 9.8m/s2. Some of us are more graceful than others, but most grade-schoolers have gained superior proficiency in comparison to our most advanced bipedal robots. Legs involve all kinds of tricky joints which bend and twist and don’t get us started on knees. Folks at the Keio University and the University of Tokyo steered toward a robot which does not ride on wheels, treads, walk or tumble. The Mochibot uses thirty-two telescopic legs to move, and each leg only moves in or out from the center.
Multi-leg locomotion like this has been done in a process called tensegrity, but in that form, the legs extend only far enough to make the robot tumble in the desired direction. Mochibot doesn’t wait for that controlled fall, it keeps as many downward-facing legs on the ground as possible and retracts them in front, as the rear legs push it forward. In this way, the robot is never falling, and the motion is controlled, but the processing power is higher since the legs are being meticulously controlled. Expecting motion control on so many legs also means that turns can be more precise and any direction can become the front. This also keeps the nucleus at the same level from the ground. We can’t help but think it would look pretty cool stuffed into a giant balloon.
Some people already know of tensegrity robots from NASA, but they may not know about the toolkit NASA published for it. Okay, seriously, how did knees pass the test of evolution? I guess they work for this jumping robot.

For all that we love 3D printers, sometimes the final print doesn’t turn out as durable as we might want it to be.
Aiming to mimic the properties of natural structures such as wood, bone, and shells, a research team lead by [Jennifer A. Lewis] at Harvard John A. Paulson School of Engineering and Applied Sciences’ Lewis Lab have developed a new combined filament and printing technique which they call rotational 3D printing.
Minuscule fibres are mixed in with the epoxy filament and their controlled orientation within the print can reinforce the overall structure or specific points that will undergo constant stresses. To do so the print head is fitted with a stepper motor, and its precisely programmed spin controls the weaving of the fibres into the print. The team suggests that they would be able to adapt this tech to many different 3D printing methods and materials, as well as use different materials and printed patterns to focus on thermal, electrical, or optical properties.
Be it adding carbon nano-tubes or enlisting the expertise of spiders to refine our printed materials, we’re looking forward to the future of ever stronger prints. However, that doesn’t mean that existing methods are entirely lacking in endurance.
[Thanks for the tip, Qes!]









