In the early 1990s, NASA experienced a sea change in the way it approached space exploration. Gone were the days when all their programs would be massive projects with audacious goals. The bulk of NASA’s projects would fall under the Discovery Project and hew to the mantra “faster, better, cheaper,” with narrowly focused goals and smaller budgets, with as much reuse of equipment as possible.
The idea for what would become the Mars InSight mission first appeared in 2010 and was designed to explore Mars in ways no prior mission had. Where Viking had scratched the surface in the 1970s looking for chemical signs of life and the rovers of the Explorer program had wandered about exploring surface geology, InSight was tasked with looking much, much deeper into the Red Planet.
Sadly, InSight’s primary means of looking at what lies beneath the regolith of Mars is currently stuck a few centimeters below the surface. NASA and JPL engineers are working on a fix, and while it’s far from certain that that they’ll succeed, things have started to look up for InSight lately. Here’s a quick look at what the problem is, and a potential solution that might get the mission back on track.
The Mission
After a six-month journey, InSight arrived on Mars in spectacular fashion in November of 2018. NASA’s coverage of the landing was outstanding: so good that it was nominated for two Emmy awards. Unlike so many times before, Mars had failed to claim InSight as a victim, and with the lander safely on station on Elysium Planitia, not far north of the Martian equator, the science began in earnest.
Most landers are self-contained platforms, with all the instruments needed to perform the science mission built into the spaceframe of the vehicle. This reduces complexity and keeps costs lower – but only when the science allows it. Since InSight was designed to explore Mars both seismically and thermally, eliminating vibrations and thermal effects from the equipment aboard the lander made it necessary to provide two tethered instrument packages which could be deployed to the surface using a robotic arm.
The first of the two instruments to be deployed was the SEIS, or Seismic Experiment for Interior Structure. Once that was safely in place and commissioned, the robotic arm placed the HP³, or Heat Flow and Physical Properties Package, a couple of meters away. Equipped with a penetrator designed to burrow itself up to five meters into the Martian regolith while trailing a string of thermal sensors and heating elements, HP³ was designed to study the thermal profile beneath the surface, leading to a better understanding of heat flows within the Martian core.
The Problem
The HP³ penetrator, dubbed “the mole”, began pounding itself into the regolith on February 28, 2019. Mission planners had allowed the penetrator two months to dig down to its full depth, but within a week, the mole called it quits. Having paid out a mere 30 cm of its instrument-studded tether, a quarter of the length of the mole was still inside the HP³ protective enclosure. The probe was far away from its minimal useful depth of three meters, and NASA and JPL engineers needed to figure out why.
Early speculation centered around that which causes consternation to almost every hole-digger on Earth: that the mole had hit a rock. Mission planners had used data from other landers to select an area where that would be as free from rocks as possible, and early estimates were that the mole would have about a 4% chance of hitting a rock that it couldn’t go around. Either NASA was spectacularly unlucky in placing the instrument, or something else was going on.
Another possibility is friction, or more specifically, the lack thereof. The innards of the mole are not very different from a common electric impact driver. In the mole, an electric motor drives a pin against a hammer with a ramped cam around its outer circumference. As the pin rotates, the came lifts the hammer up against spring pressure until it reaches the end of the ramp. The hammer is then forced down against the penetrator’s tip by the spring, directing a powerful force downward. The force of friction from the regolith against the hull of the penetrator, along with the force of a second damping spring, keep the mole from simply bouncing back up out of the hole.
And therein lies the problem, at least according to the current thinking. It appears that the individual grains of regolith the mole is trying to burrow into are not compacted well, thanks to the lower gravitation of Mars. It could be that the mole has made no progress because there’s nothing to hold it in place, and that the device is just bouncing around and not digging deeper.
The Fix
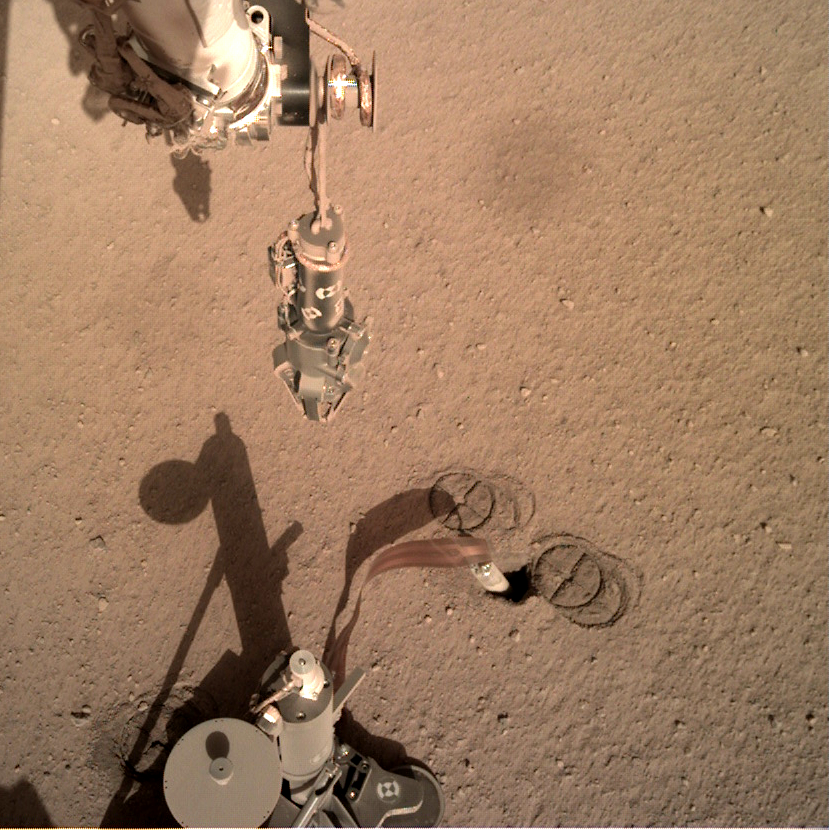
To assess this, mission controllers decided they needed a look at the mole. Covered by the HP³ tower, there is no way to tell exactly what’s happening, so a plan was developed for moving it. This was no easy feat; aside from the fact that it would necessarily unspool some of the science tether, possibly resulting in a tangle, there was a chance that the mole would snag on something and be pulled completely out of the hole, ending its mission entirely. Add to that the complexity of operating a robotic arm over a high-latency connection, and the operation would require exquisite planning.
The HP³ removal was done painstakingly, in three very slow, very deliberate stages. On July 26, NASA revealed pictures of the uncovered mole which seem to corroborate the low-friction regolith theory: the end of the mole is sitting askew inside a wide conical hole, exactly what you expect from something that has been bouncing around in one place rather than hitting a rock and getting stuck.
Mission planners are now using all the data to develop a plan to save HP³. Tests on Earth using a duplicate penetrator and simulated Martian regolith seem to confirm that the friction issue is to blame, in which case there may be options. The mole might just need a little extra friction to get started; if enough of the hull is in contact with the regolith, it may just be enough to begin moving downward. To that end, NASA is reportedly concocting a plan to use the sample scoop on the robotic arm to fill in the hole and compact the regolith around the mole a bit. That might just get things started again.
Any way you slice it, the InSight team has done a tremendous job working this problem under difficult conditions. If they’re lucky, we may soon see the mole’s long Kapton tail disappearing down the deepest extraterrestrial hole we’ve ever dug, and we’ll start learning more about the Red Planet’s interior.














“faster, better, cheaper” …. pick any two.
“Hold my Tang” — NASA
A problem which could have been solved by a human on site in 5 minutes has taken nearly 7 months (and counting) to fix (if it gets fixed at all.) Says something for manned space exploration.
Uber doesn’t do Mars.
Are you really saying it would have been more efficient somehow to have sent a person to Mars?
If you don’t count bringing a person back it would be
Think they could have learned something from an Earth mole?
You mean an Earth mole digs with its front feet and pushes forward with its back?
Or are you saying that Earth moles are easy?
Next time send an auger drill. Design one with an electric motor and a box on top to scoop rocks and dirt into for extra weight.
I’d be very surprised that when designing the mission they didn’t consider all the options available for sinking a probe beneath the Martian soil. If they didn’t select an auger style drill for this mission then it would be for very good reasons I’m sure.
Right? Clearly the answer would be to send Bruce Willis and a rag-tag group of drillers to dig the hole.
To drill a 5m hole with an auger would need a 5m long auger, no?
No.
Why would it?
On Earth you would dig a deeper hole than your auger is long by attaching the auger to a pole.When it reaches the depth where the non-auger end of the pole is near the surface you attach another pole to the end. You can keep going like that until you reach your desired depth or run out of poles.
I’m sure a robot that does this the same way could be designed. Having all those separate pieces that have to be assembled by remote control though…
I’m imagining the same thing but the poles are shorter and already connected to one another via u-joints. That way the whole thing can wrap around a spool yet still translate rotational energy to the auger. You would end up having to rotate the whole spool though even as it unwinds meaning that spool has to move around two axis at the same time. That still seems a bit mechanically complicated though not impossible. I bet the idea can be developed further to come up with something mechanically simpler and so more reliable.
That’s a lot of moving parts though, compared to the impact-hammer-in-a-can they’ve got in place. That, and probes like these have strict power budgets because they’re solar powered – a motor to drive that contraption might take too much power.
Might have been better to drop a spike from orbit, then land and connect to it.
I wouldn’t be surprised at all. ‘Not invented here’….
this is the sort of thing that, with a probe, is many months and often unrecoverable issue, at best leading to unsatisfying results. The cheaper faster option needs a second complete expenditure to get another one or two science packages on the ground. Whereas with a manned mission, its a hour or two discussion (minus lightspeed delay) to figure out whats wrong, move the thing, and maybe even modify hardware and make it happen. And dozens of other completely disparate science experiments and deployment options, all from a single mission. Might be more expensive, but if it gives you the equivalent of 5 or 6 launches of narrow focus science packages and a few repeats of them because the packages failed, it might be worth it. But there is also the end goal to keep in mind. The point of sending probes to learn what things are like out there, is only valuable when you plan on BEING out there. knowing about conditions that can never naturally occur on earth is actually quite limited in usefulness. What you want to understand is how things are where those conditions constantly affect your species.
“…Might be more expensive…”
Yes. Perhaps :)
Having a general purpose extremely flexible maintenance and deployment device on site (i.e., a human) would certainly be nice. but it’s not ‘might be more expensive’, it is MUCH more expensive. As an example, Apollo (tried) to land 7 manned missions on the Moon (one failure), while Surveyor tried to land seven as well (two failures). But Apollo cost 25.4 billion, while Surveyor cost 470 million. Apollo cost more than 50x what Surveyor did. Or to put that another way, for the cost of a single Apollo landing, you could have put up on the order of 50 Surveyor landings.
That ‘cheaper faster option that needs to be done again, and again, and again…’ Can be – because it’s that economical compared to a manned mission.
And then we have situations like Opportunity (may she rest in peace). That was around 400 million… but gave us a time series of 14 years and traverse distance of 28 miles. Compare that with SLS… which is over 50 billion, can’t get to Mars, and certainly can’t support even a single human for a year let alone 14.
There are places for men… and there are places for robots. Confusing the two costs a lot of money (both ways).
If they were able to duplicate the problem on Earth with simulated martian regolith why didn’t they find this problem the same way before launch?
If they’d taken the clothes off the mole and made it more mousy looking, then maybe the resulting nekkid mole rat would have worked better.
“a wide conical hole, exactly what you expect from something that has been bouncing around in one place rather than hitting a rock and getting stuck.”
Pardon my naivety but isn’t that also what you would expect if it hit a rock? Namely bouncing around in one place and going nowhere?
I am also curious as to how you can reliably calculate the statistics of hitting an invisible buried rock .
If only I could do that in my back yard or on a campsite !
This reminds me of the assumption that harpoons would work with the Philae lander on ice that is as hard as metal at those temperatures.
The ‘wide conical hole’ is indicative of a very low friction low coherent soil; had it hit a rock (*and* been in better packed soil) the expectation is that it would have failed to go deeper but not that it would show the widening conical depression. That’s not a sure thing (‘what if it’s low coherence soil AND it hit a rock?’), but it’s suggestive of one problem over the other.
The statistics of a buried rock are something you can get at actually: take a picture and count the number and size distribution of rocks exposed on the surface. Now assume (not unreasonably for *some* types of terrain) that the near surface environment is similar to the surface environment, and you can make some reasonable (not perfect) extrapolations. You can *always* get unlucky… but you can say that a place where rocks mantle 50% of the surface is a bad bet, and a place where rocks account for just 3% of the surface is a good one.
The ‘you can’t stick a harpoon in ice’ point is an interesting one… the surface hardness (& for that matter composition) wasn’t at all known ahead of time. Yes, it could have been solid water ice with a 1 meter thick… or it could have been fine regolith held together by much weaker ices (such as ammonia-water-CO2 eutectics).
I’d love to see the earth-side sites where you have 5 m deep pure sands next to stone strewn gravelly plots as seen on the rover pics – and i’d also like to see the rationale of how the mole is supposed to bypass stones in the kind of compacted sands they say they expected: The mole cannot bend, and it has a very sharp tip, which, once caught on the rough exterior of a stone, would never let go again.