Soft robotic grippers have some interesting use cases, but the industrial options are not cheap. [James Bruton] was fascinated by the $4000 “bean bag” gripper from Empire Robotics, so he decided to build his own.
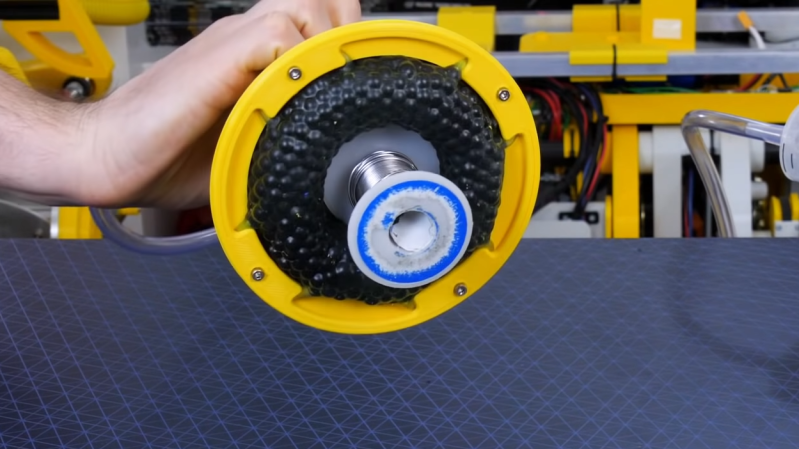
The gripper is just a flexible rubber membrane filled with small beads. When it is pushed over a object and the air is sucked out, it holds all the beads together, molded to the shape of the object. For his version [James] used a soft rubber ball filled with BBs. To create a vacuum, he connected a large 200cc syringe to the ball via a hose, and actuated it with a high torque servo.
It worked well for small, light objects but failed on heavier, smooth objects with no edges to grip onto. This could possibly be improved if the size and weight of the beads/BBs are reduced.
For some more soft robotics, check out this soft 3D printed hand, and the flexible electrically driven actuators.














I wonder if a combination of pneumatics and ridged surface (“skin”) to give it some grip would solve the problem?
The original jamming gripper used coffee grounds, I think. Something about their jagged geometry makes them lock together really well. Seems like bb’s would slide over each other and not jam as well.
Also RIP empire robotics, they went out of business a few years ago.
https://www.liebertpub.com/doi/abs/10.1089/soro.2016.0021?journalCode=soro
I think an important part about the coffee grounds is that it is a bit soft and compliant powder.
With no under pressure, the grounds form to the contour of the stuff you want to grip.
Then when vacuum is applied, it complies a bit and contracts, which puts the force of the vacuum on the part you want to grip instead of the coffee.
But also somethig in the way the particles “grip” each other.
Pre-packaged ground vacuum sealed coffee is quite hard, and even stays in shape after the vacuum seal is broken and you have to move the parts a bit to turn it back into a powder.
If you’re trying to grip/lift something without edges then you’d probably need either a skin that had small irregularities such as fingerprints or a means to develop a vacuum on the surface like a suction cup. The problem with a jamming gripper that can also act as a suction cup is that you suddenly have to make a complex inner structure in order to be properly rigid along the circumference of the contact area and flexible enough to retract inside of that outline. I guess it would be possible to make the jamming media itself pock-marked and permeable to vacuum in order to develop small localized suction cups, resulting in an aggregation of such suction areas across the total surface area (something akin to an octopus, but many more smaller and disorganized suction cups).
I was thinking Gecko Grip Finger Prints..
So that’s how the Daleks grab things! Maybe if the membrane he uses had small ridges on it, it would help in grabbing more difficult objects, just like the dermal ridges on hands help us hold on to things.
A fresnel lens type surface might do well.
Soon Skynet and Day of the Tentacle will unite!
There’s a toy called a, “wubble bubble ball”, it may prove to be hmwhat James is looking for, they are about 11-12″ across when deflated but expand to over a meter and are incredibly resilient for their elasticity. They also come with a premade hole for filling them with air.
I’m also wondering if these might be more effective if the air was replaced with a liquid.
There´s a gripper with MRα fluid that solidifies when a magnetic field is applied, they use iron particles, so abit smaller then BB´s. They could pickup +50N items still needed ridges tho
I wonder if filling the ball with flour would work well? I’m remembering the squishy faces you used to get made of a balloon filled with flour with googley eyes stuck on, haven’t seen them in years.