When it comes to the “build versus buy” question, “buy” almost always wins. The amount of time you have to put into building something is rarely justified, especially with a world of options available at the click of a mouse.
That’s not always the case, of course. These custom-made linear actuators are a perfect example of when building your own wins. For a planned ball-juggling robot, [Harrison Low] found himself in need of linear actuators with long throw distance, high speed, and stiff construction. Nothing commercially available checked all the boxes, so he set out to design his own.
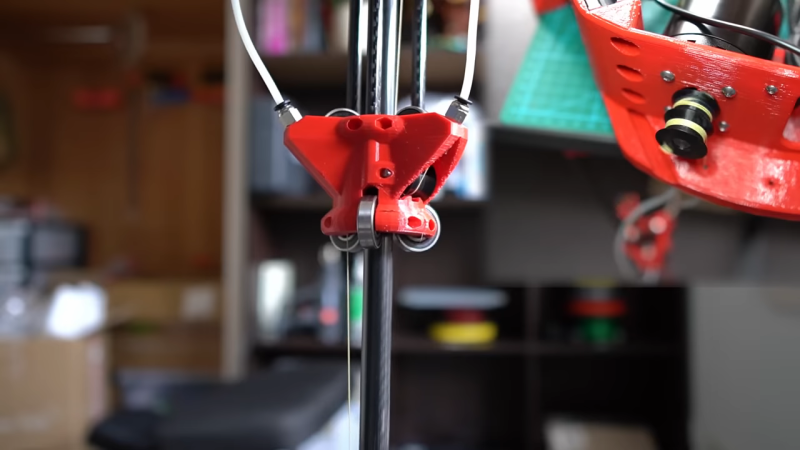
A few design iterations later, [Harrison] arrived at the actuators you see in the video below. Built mainly from carbon fiber tubing and 3D-printed parts, the actuators have about 30 centimeters of throw, and thanks to their cable-drive design, they’re pretty fast — much faster than his earlier lead screw designs. The stiffness of the actuator comes by way of six bearings to guide the arm, arranged in two tiers of three, each offset by 60 degrees. Along with some clever eccentric spacers to fine-tune positioning, this design provides six points of contact that really lock the tube into place.
The cable drive system [Harrison] used is pretty neat too. A Kevlar kite string is attached to each end of the central tube and then through PTFE tubes to a pulley on an ODrive BLDC, which extends and retracts the actuator. It’s a clever design in that it keeps the weight of the motor away from the actuator, but it does have its problems, as [Harrison] admits. Still, the actuator works great, and it looks pretty cool while doing it. CAD and code are available if you want to roll your own.
These actuators are cool enough, but the real treat here will be the ball juggler [Harrison] is building. We’ve seen a few of those before, but this one looks like it’s going to be mighty impressive.
Thanks to [Quinor] for the tip.













I thought carbon fiber was Kevlar heated to char temperatures.
Its true that Carbon Fibres are made from superheating polyacrylonitrile until all thats left is carbon. However “Kevlar” is just a trade name and the base is a polyamide. Different polymers.
Fascinating, I didn’t know much of that
It seems to be made well enough, and able to get the job done it’s designed for. One thing I do not like is the steel wheels running over the carbon fiber tubes. As long as it’s clean it may have a long life, but contamination (such as grains of sand) can pit the tubes and cause other wear issues. The brittleness of carbon fiber tubes is a significant limitation in this sort of application.
As for the string running over the ball bearing… Small V-groove pulleys (starting from 6mm or so) are readily available and could be worked into the design easily. On the other hand, stretching some strings along the each of the tubes may create a better bearing surface then the carbon fiber on it’s own. You could even glue serveral strings with different diameters to create a flatter surface for the bearings (but that would be time consuming).
And bare teflon tubes do not make very good bowden cables, because of their compressability. Bowden cables are available in different strengths, and even the most common type used for bicycle brakes is quite strong and stiff. But why use bowden cables at all? The string could be a simple loop between the motor pulley and a V-groove pulley? But of course, the use case of such an actuator guides the design that fits best for the application.
Yeah, I think both “friction partners” are not playing too well together. One ist hardened steel and one is quite abrasive carbon fiber rod. I think the Bambu Lab X1 Carbon uses a similar technique?!
If so, with those printing speeds the rods or bearings will very soon suffer quite a bit…
To clarify: it wasn’t meant negative in any way, it’s a very cool motion system! Time will tell…
Bicycle shift cable housing comes to mind on the bowden replacement
As a quick fix, you could slide a larger (As close a fit as possible) ptfe tube over your original ptfe tubes. It will guard against buckling. It will also make the tube less flexible, indirectly adding load to a multi axis system, so your call if it’s useful or not.
I feel there’s a corrXY in there somewhere…