There is a significant constituency among hackers and makers for whom it is not the surroundings in which the drink is served or the character of the person serving it that is important, but the quality of its preparation. Not for them the distilled wit and wisdom of a bartender who has seen it all, instead the computer-controlled accuracy of a precisely prepared drink. They are the creators of bartending robots, and maybe some day all dank taverns will be replaced with their creations.
Drinkro is a bartending robot built by the team at [Synchro Labs]. It uses a Raspberry Pi 3 and a custom motor controller board driving a brace of DC peristaltic liquid pumps. that lift a variety of constituent beverages into the user’s glass. There is a multi-platform app through which multiple thirsty drinkers can place their orders, and all the source code and hardware files can be found in GitHub repositories. The robot possesses a fairly meagre repertoire of vodka and only three mixers, but perhaps it will be expanded with more motor driver and pump combinations.
There is a video of the machine in action, shown below the break. We can’t help noticing it’s not the fastest of bartenders, but maybe speed isn’t everything.
There isn’t a lot of detail to be found behind this short demo of robot-based physical feedback for VR, but the video (embedded below) demonstrates things well. It’s an experiment in generating force feedback for virtual objects using a Baxter robot and the HTC Vive. When the user presses against a wooden block in VR, the robot presses back which simulates the mass of the virtual object. Force feedback is one of these areas in which research is ongoing, and in a variety of different directions.
Like so many other things in life, nothing beats the real thing for actual physical feedback. Also, there’s something great about giving a $25,000 robot the job of impersonating a few simple wooden blocks in VR, just so you can strap on a VR rig and basically give a robot a realistic-feeling fist bump.
This collaboration between ETH and the Disney empire’s research arm is a ultra-light robot that can roll across horizontal surfaces and also transition and climb walls.
The robot has four wheels with one steerable set, but its secret sauce is the two propellers gimbaled on its back. Using these propellers it can move itself across the ground, but also, when approaching a wall, provide enough thrust to overcome the gravity vector.
Naturally, the lighter the robot, the less force will be needed to keep it on the wall. That’s why the frame is made from carbon fiber corrugated sandwich panels. The motors, batteries, and controllers are all also light and small.
We liked how the robot was, apparently, using its propellers to provide additional stability even while on the ground. There is a video after the break, and more information can also be found on the Disney Research webpage.
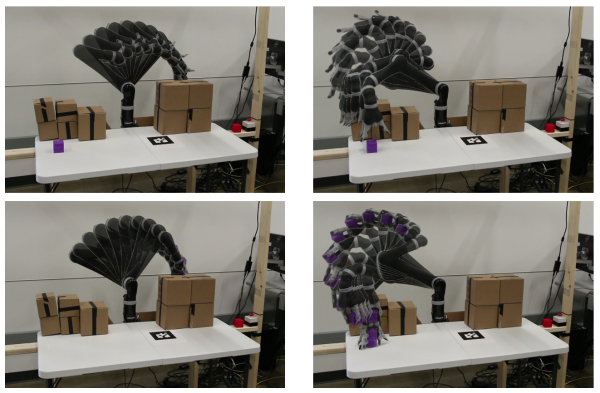
For humans, moving our arms and hands onto an object to pick it up is pretty easy; but for manipulators, it’s a different story. Once we’ve found the object we want our robot to pick up, we still need to plan a path from our robot hand to the object all the while lugging the remaining limbs along for the ride without snagging them on any incoming obstacles. The space of all possible joint configurations is called the “joint configuration space.” Planning a collision-free path through them is called path planning, and it’s a tricky one to solve quickly in the world of robotics.
These days, roboticists have nailed out a few algorithms, but executing them takes 100s of milliseconds to compute. The result? Robots spend most of their time “thinking” about moving, rather than executing the actual move.
Robots have been lurching along pretty slowly for a while until recently when researchers at Duke University [PDF] pushed much of the computation to hardware on an FPGA. The result? Path planning in hardware with a 6-degree-of-freedom arm takes under a millisecond to compute!
It’s worth asking: why is this problem so hard? How did hardware make it faster? There’s a few layers here, but it’s worth investigating the big ones. Planning a path from point A to point B usually happens probabilistically (randomly iterating to the finishing point), and if there exists a path, the algorithm will find it. The issue, however, arises when we need to lug our remaining limbs through the space to reach that object. This feature is called the swept volume, and it’s the entire shape that our ‘bot limbs envelope while getting from A to B. This is not just a collision-free path for the hand, but for the entire set of joints.
Image Credit: Robot Motion Planning on a Chip
Encoding a map on a computer is done by discretizing the space into a sufficient resolution of 3D voxels. If a voxel is occupied by an obstacle, it gets one state. If it’s not occupied, it gets another. To compute whether or not a path is OK, a set of voxels that represent the swept volume needs to be compared against the voxels that represent the environment. Here’s where the FPGA kicks in with the speed bump. With the hardware implementation, voxel occupation is encoded in bits, and the entire volume calculation is done in parallel. Nifty to have custom hardware for this, right?
We applaud the folks at Duke University for getting this up-and-running, and we can’t wait to see custom “robot path-planning chips” hit the market some day. For now, though, if you’d like to sink your teeth into seeing how FPGAs can parallelize conventional algorithms, check out our linear-time sorting feature from a few months back.
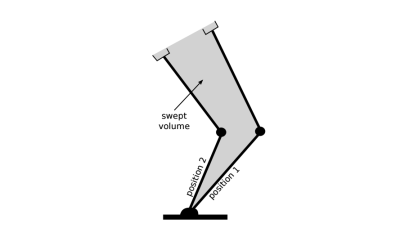
There’s a theory that the fear of scurrying things is genetic. Likewise, a similar theory arose about the tendency for humans to find helpless things cute. After all, our useless babies do best in a pest free environment. This all could explain why we found this robotic roach to be both a little cute and a little creepy.
This robot looks like a ladybug going through its rebellious teen phase. It runs on six hook shaped legs which allow it to traverse a wider array of surfaces than wheels would, at the expense of speed and higher vibrations. The robot does a very convincing, if wobbly, scurry across the surface of its test table.
It also has a secret attack in the form of a single Rockem Sockem Robot arm located on its belly. With a powerful burst, the arm can launch the robot up a few feet to a higher surface. If the robot lands on its wheels the researchers high-five. If the robot lands on its back, it can use its ,”wings,” to flip itself right-side-up again.
The resulting paper (PDF file) has a nice description of the robot and its clever jumping mechanism. At least if these start multiplying like roaches, hackers will never short for tiny motors for their projects. Video after the break.
Watching robots doing sports is pretty impressive from a technical viewpoint, although we secretly smile when we compare these robots’ humble attempts to our own motoric skills. Now, a new robot named Robomintoner seeks to challenge human players, and it’s already darn good at badminton.
Finally the workings of the official BB-8 that you’ve seen rolling around at various events have been revealed. Its makers [Matt Denton] and [Josh Lee] participated in an hour-long presentation at Star Wars Celebration Europe 2016 just this past week where the various views of its internals were shown in action. It’s since had BB-8 builders (yours truly included) analyzing the workings for new ideas. We also now have the official name for it, red carpet BB-8.
For the first half of their talk they went over how BB-8 was implemented for Star Wars: The Force Awakens. As we’ve long known this was done using 7 puppeted BB-8’s, though it was revealed that only 4 were actually used, including a stationary one called the wiggler whose purpose you can guess. Another thing we didn’t know is that they did consider building a working BB-8 for filming but decided they needed something bullet proof, that would work right every time without making a film crew wait for repairs, and so went with the puppets instead.
The second half of their talk contained the big reveal, the mechanism inside red carpet BB-8’s ball. It turns out to be pretty close to what many builders have been doing. If you’ve seen the DIYer’s guide to the different BB-8 drive systems then you’ll understand when we say it’s a pendulum drive (aka axle drive). That is, there’s a motorized axle that crosses the middle of the ball and the ball rotates on that axle. Meanwhile a large mass suspended below the axle acts as the pendulum mass.
Red Carpet BB-8 side with cables
Red Carpet BB-8 side with actuator
BB-8 builders have known the importance of keeping as much mass as possible as low down as possible for stability, but it was revealed the great extent to which that has been done in the red carpet version. Motors for the head’s pitch and yaw are located at the bottom and their motion is transferred up to the center using what are maybe best known as bicycle brake cables. Another big reveal was a linear actuator for the body roll, tilting the center stuff with respect to the mass lower down. The actuator itself is located in the lower section. Also, BB-8 builders have been mounting the drive motors for rotating the ball with respect to the axle, in line with the axle. However, in red carpet BB-8 the motor is also at the bottom and its motion appears to be transferred up to the axle via belt and worm gears. You may mistake the gold cylinders on either side of the central gimbal system to be motors but they’re actually Moflon slip rings.
Those are just a few of the insights gained so far from analyzing the video below. Doubtless people will be noticing a lot more in the weeks to come.